miniaturyzacja czujników
Potrzeba coraz większej miniaturyzacji urządzeń elektronicznych w celu zastosowania ich w narzędziach codziennego użytku, miniaturowych robotach i bezzałogowych statkach powietrznych (UAV) jest przewidywana do zatrzymania na kilka lat przed dalszym przeskokiem od mikro do nano wielkości urządzeń. Dlatego obecnie dostępne na rynku inercyjne jednostki pomiarowe wymagają przeglądu. Istnieje wiele komercyjnych inercyjnych jednostek pomiarowych dostępnych na rynku. Na przykład 3DM-GX 1 firmy MicroStrain, MTi-G firmy Xsens Technologies, Crista IMU firmy Cloud Cap Technology, μNAV firmy Crossbow Technology, AHRS200AV2.5 firmy Rotomotion oraz ADIS 16400/405 firmy Analog Devices. W celu weryfikacji możliwości wymienionych rozwiązań porównaliśmy jego charakterystykę z aktualnym stanem techniki miniaturowych MEMS IMU 5 opracowanych przez autorów tekstu. Porównanie widoczne jest w zakładce. 1.
Obecny stan techniki IMU 5 10-DOF pozwala na pomiar kątów w trzech wymiarach, przyspieszeń również w trzech wymiarach, kierunku najsilniejszego sygnału magnesu oraz temperatury otoczenia. Wykorzystuje technologię MEMS w celu zmniejszenia zarówno rozmiaru jak i wagi czujnika. Czujnik waży zaledwie 1,13 bez mocowania i 3,13 z mocowaniem standardowym.
Dane pomiarowe z czujnika IMU 5 w zależności od wersji mogą być przesyłane przez magistralę USB, CAN lub RS-232, które są typowymi standardami przemysłowymi przesyłu danych. Elastyczność jest wymagana od nowoczesnych czujników w celu zintegrowania ich z istniejącymi systemami. Z tego samego powodu czujnik posiada elastyczną konfigurację danych wyjściowych. Dane wyjściowe z czujnika mogą być pobierane w trzech wersjach: jako surowe dane z czujnika, jako dane po kalibracji i kompensacji temperatury lub jako wyjście filtra przetwarzającego. Dane z czujników mogą być również dostarczane w różnych postaciach do użytkownika. Pierwszą formą jest macierz obrotu, która jest generowana na podstawie danych z urządzenia. Dane mogą być również dostarczane do użytkownika końcowego w postaci kątów Eulera i ich wartości podawanych w stopniach lub radianach. Trzecim rodzajem reprezentacji danych wyjściowych jest wykorzystanie kwaternionów.
Schemat działania mikrojednostki pomiarowej przedstawiono na rys. 3, a charakterystykę wewnętrzną w tab. 2.
Jednym z podstawowych czujników inercyjnych jest żyroskop mierzący prędkość kątową Ω (w schemacie GYRO(X), GYRO(Y), GYRO(Z)). Czujniki te zostały zorientowane w taki sposób, że ich osie pomiarowe tworzą prawoskrętny kartezjański układ współrzędnych. Wyjście sygnałów analogowych typu MEMS jest filtrowane przez konfigurowalny filtr dolnoprzepustowy (12.5, 25, 50, 110 Hz). Po filtracji sygnał jest zamieniany na postać cyfrową przez przetwornik analogowo-cyfrowy o rozdzielczości 16 bitów. Sygnał cyfrowy może być dalej filtrowany przez konfigurowalne filtry dolno- i górnoprzepustowe. Częstotliwość danych z żyroskopów może być ustawiona na 100, 200, 400 lub 800 Hz. Rozdzielczość pomiarów może być konfigurowana z modyfikowaną dokładnością w zakresie od 250°/s do 2000°/s.
Kolejnym ważnym elementem schematu jest blok czujników przyspieszeń liniowych (w schemacie ACC(X), ACC(Y), ACC(Z)). Czujniki zostały zorientowane w taki sposób, aby osie pomiarowe również tworzyły prawoskrętny kartezjański układ współrzędnych. Sygnały analogowe z wyjścia MEMS czujników zostały przekierowane do filtra i dalej do przetwornika analogowo-cyfrowego. Maksymalna rozdzielczość mierzonych przyspieszeń może być skonfigurowana na ±2/±4/±8 (g ≇9.81m/s2). Czułość akcelerometrów była mierzona jako 1 .
| Producent | MicroStrain | Xsens Technologies | Cloud Cap Technology |
| Model | 3DM-GX1 | MTi-G | Crista IMU |
| Czujniki wewnętrzne | akcelerometry, żyroskopów, magnetometrów, czujnika temperatury | akcelerometrów, magnetometrów, żyroskopów, GPS | akcelerometrów, żyroskopów, czujnik temperatury |
| zakres żyroskopów | ± 300°/sek | ± 300°/sek | ± 300°/sek |
| Zakres przyspieszeniomierzy | ± 5 g | ± 5 g | ± 10 g |
| Wyjście cyfrowe | RS-.232, RS-485 | RS-232, USB | RS-232, CAN |
| Zakres temperatur | -40°C do +70°C | -20°C do +60°C | -40°C do +70°C |
| Wymiary z montażem | 64x90x25 | 58x58x33 | 52.07×38,8×25,04 |
| Waga | 75 | 68 | 38.6 |
| Producent | Crossbow Technology | Analog Devices | Rotomotion |
| Model | μNAV | ADIS 16400/405 | AHRS200AV2.5 |
| Czujniki wewnętrzne | akcelerometry, żyroskopy, magnetometry, czujnik temperatury, GPS | akcelerometry, magnetometry, żyroskopy, czujnik temperatury | akcelerometry, żyroskopy, magnetometry |
| żyroskopy zakres | ± 150°/sek | ± 75-300°/sek | ± 90°/sek |
| Zakres akcelerometrów | ± 2 g | ± 18 g | ± 2 g |
| Wyjście cyfrowe | RS-232 | SPI | RS-232, Ethernet |
| Zakres temperatur | -5°C do +45°C | -40°C do +85°C | -5°C do +75°C |
| Wymiary z montażem | 57x45x11 | 31.9×23,5×22,9 | „/>100×100 |
| Waga | 33 | 16 | „/>100 |
Tabela 1.
Porównanie dostępnych obecnie na rynku miniaturowych inercyjnych jednostek pomiarowych.

Rysunek 3.
Schemat działania IMU.
Następny blok funkcjonalny mierzy pole magnetyczne Ziemi za pomocą magnetometrów (w schemacie MAG(X), MAG(Y), MAG(Z)). Osie pomiarowe czujników zorientowane są w prawoskrętnym kartezjańskim układzie współrzędnych. Wyjście analogowe z czujników podłączone jest do przetwornika analogowo-cyfrowego i dalej do bloku konfigurowalnych filtrów. Maksymalne wartości możliwe do zmierzenia mieszczą się w zakresie od 1.3 do 81. z rozdzielczością 1/1055 .
Ostatni blok funkcjonalny zawiera termometr mierzący temperaturę w otoczeniu IMU w celu umożliwienia kompensacji temperaturowej wskazań akcelerometrów, żyroskopów i magnetometrów.
Wszystkie bloki funkcjonalne połączone są z jednostką centralną oznaczoną w schemacie uProcessor. W celu przechowywania wymaganych dla algorytmów parametrów została dodana dodatkowa pamięć (oznaczona w schemacie jako eeprom). Jednostka centralna dokonuje filtrowania danych przed ich przekierowaniem na wyjście CAN lub USB lub RS-232. W celu ustalenia parametrów algorytmu filtrującego wymagana jest faza kalibracji.
| Czujniki wewnętrzne | akcelerometry, żyroskopy, magnetometry, czujnik temperatury | Zakres pracy żyroskopów | od ± 250 do 2000°/s |
| Zakres pracy akcelerometrów | od ± 2 do ± 8 g | Wyjście cyfrowe | CAN, USB lub RS-232 |
Tabela 2.
Charakterystyka wewnętrzna prezentowanej inercyjnej jednostki pomiarowej.
Prezentowany czujnik IMU ma objętość poniżej 2cm3 z obudową i waży 3,13. Taka wielkość czujnika może pozwolić projektantom robotów na przejście od urządzeń o znacznych rozmiarach do konstrukcji w skali mikro. Maksymalne przyspieszenie jakie jest w stanie wytrzymać czujnik to 500 , natomiast napięcie wejściowe wynosi od 3.5 do 8V, a pobór prądu to 35 mA. Istnieją trzy różne typy obudowy, które umożliwiają zamocowanie czujnika w różnych miejscach. Najmniejsza z nich wersja Micro (rys. 4) o wymiarach z mocowaniem 18,6 x 14,7 x 7,3 . Wersja z dodatkowymi otworami montażowymi wersja Micro-Mounting (rys. 5a) ma wymiary 18,6 x 20,7 x 7,3 . W obudowach wersji Micro i Micro-Mounting przewód wyjściowy jest zakończony złączem USB lub RS-TTL w zależności od wersji. Dostępna jest również wersja rozszerzona z otworami montażowymi i wtykiem LEMO osadzonym w obudowie (rys. 5b). Jej wymiary wynoszą 32,0 x 18,0 x 16,5 .
Wymiary fizyczne wszystkich wersji przedstawiono w tab.3.

Rysunek 4.
Przednia i tylna strona inercyjnej jednostki pomiarowej.
Kalibrowane orientacje osi są wygrawerowane i pokolorowane na górnej stronie, jak pokazano na Rys. 5. Rozmiar pojedynczego mocowania wynosi 6,15 mm dla wersji Micro-Mounting, oraz 6,50 mm dla wersji Extended LEMO.
Przed zastosowaniem IMU w obiektach fizycznych dokonano porównania najmniejszych dostępnych na rynku czujników w celu weryfikacji możliwości nawigacji autonomicznych pojazdów mobilnych. Badania porównawcze miały na celu sprawdzenie parametrów ustawionych prototypu, przeanalizowanie przyczyn błędów pomiarowych oraz sprawdzenie jak czujniki, na których przeprowadzono testy zachowują się w sytuacjach ekstremalnych. Do testów wykorzystano dwa popularne, komercyjne czujniki miniaturowe: MTiG-28G firmy XSens Technologies oraz Crista IMU firmy Microstrain (rys. 6b).
| IMU typ | Dim. X | Dim. Y | Dim. Z | Units | Volume |
| Wersja Micro | 18.6 | 14.7 | 7,3 | mm | 1,996 cm3 |
| Wersja micro | 18.6 | 20,7 | 7,3 | mm | 2,811 cm3 |
| Wersja rozszerzona | 32.0 | 16,5 | 18,0 | mm | 9,504 cm3 |
| Parametry wspólne | Min. | Typ | Max. | Jednostki | |
| Waga (bez obudowy) | – | 1.13 | – | gram | |
| Waga (z obudową) | – | 3.13 | – | gram | |
| Temperatura pracy | -40 | – | 80 | °C | |
| Temperatura przechowywania | -.60 | – | 100 | °C | |
| Maksymalne przyspieszenie | – | 500 | – | g | |
| Napięcie wejściowe | 3.5 | 5,0 | 6,0 | V | |
| Prąd | 30 | 35 | 40 | mA | |
Tabela 3.
Charakterystyka fizyczna czujnika.

Rysunek 5.
Schemat montażu micro IMU. a) Wersja Micro-Mounting, b) Wersja Extended LEMO.

Rysunek 6.
A) Porównanie wielkości prezentowanego IMU do produktów dostępnych na rynku, b) Platforma porównawcza IMU. Prezentowany IMU jest oznaczony czerwoną elipsą. W lewej części obrazu widoczny jest IMU Crista. Po drugiej stronie widać MtiG Imu firmy XSense Technologies.
W celu przeprowadzenia badań porównawczych zaprojektowano, wykonano i zastosowano platformę kalibracyjną (rys. 6b). Na platformie zamontowano wszystkie testowane IMU, a ich dane surowe skalibrowano do wspólnego układu współrzędnych dla wszystkich czujników za pomocą przedstawionej metody kalibracji. Przeprowadzono kilka testów: porównanie danych surowych, porównanie danych przefiltrowanych, stabilność czasową czujników oraz możliwość kompensacji temperaturowej. Na rys. 7a przedstawiono porównanie odczytów z akcelerometrów prezentowanego czujnika IMU (CZK na wykresie) i czujnika MTiG (MTI na wykresie), a na rys. 7b porównanie żyroskopów. Oba porównania zostały zarejestrowane podczas ruchu.
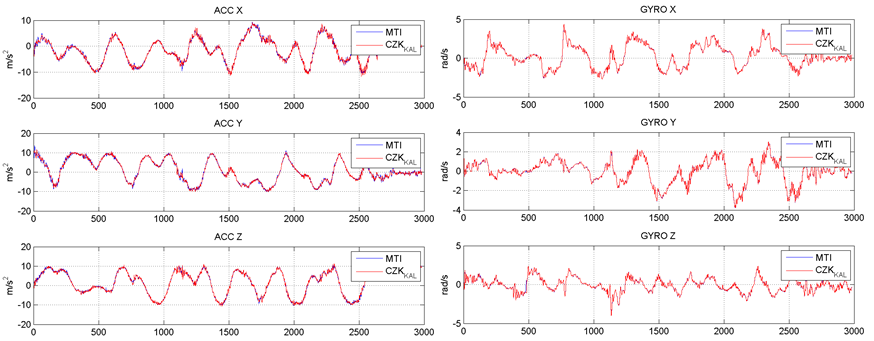
Rysunek 7.
Przykładowy wykres z badań porównawczych prezentowanego czujnika IMU oraz czujników dostępnych na rynku. Prezentowany czujnik IMU oznaczony jest jako CZK, a czujnik MTiG firmy XSens Technologies oznaczony jest jako MTI. Jednostkami czasu są . a) odczyty z akcelerometrów, b) odczyty z żyroskopów.
Daje się zauważyć, że dane wyjściowe z prezentowanego kalibrowanego czujnika i czujnika referencyjnego są prawie takie same. W celu zmierzenia różnic oszacowaliśmy sygnał z danych surowych i oddzieliliśmy go od składowej szumowej. Jako przykład do prezentacji została wybrana tylko oś pomiarowa Y żyroskopu. Wybór ten był możliwy, ponieważ uzyskane wyniki są porównywalne niezależnie od osi i czujnika (magnetometru, akcelerometru czy żyroskopu). W prawej części rys. 8 pokazano, że odchylenie standardowe szumu dla MTi-G28 i naszego czujnika wynosi około 0,04, podczas gdy wynik uzyskany przez IMU Crista wynosi około 0,12. Różnica pomiędzy odchyleniem standardowym MTi-G28 i naszego czujnika wynosi tylko 0.0035, co jest zazwyczaj nie do odróżnienia przez ludzkie oko.
Dodatkowe zestawienie tabelaryczne współczynnika sygnału do szumu przedstawiono w tab. 4.
Ważnym problemem dla inercyjnych jednostek pomiarowych jest stabilność czasowa danych wyjściowych. Przeprowadziliśmy serię testów stabilności o czasie trwania 4h. Przedstawione na rys. 9 wyniki zostały uzyskane po uśrednieniu z pięciu próbek każdego IMU w teście. Można poczynić dwie główne obserwacje. Po pierwsze, że wyniki MTi-G28 i naszych IMU są porównywalne. Różnica uzyskanych wartości średnich wynosi zaledwie 0.00027, a różnica pomiędzy wartościami odchylenia standardowego 0.00226, co jest jeszcze niższą wartością niż podczas testu z ruchem. Drugą obserwacją jest to, że wyniki naszego czujnika i MTi-G28 są ponad 20 razy bliższe rzeczywistej wartości 0.

Rysunek 8.
Porównanie danych wyjściowych podczas ruchu z osi Y żyroskopów dla badanych czujników (MTiG-28, Crista IMU i nasz czujnik). Jednostki czasu to .
| Crista IMU (S/NKAL) | MTiG (S/ NKAL) | IMU 5 (S/NKAL) | |
| Akcelerometry | 20,3 | 38,1 | 43,2 |
| Magnetometry | N/A | 719,3 | 767,9 |
| Żyroskopy | 13,6 | 206,7 | 254,5 |
Tabela 4.
Porównanie współczynnika sygnału do szumu dla badanych IMU. (Im większa wartość tym lepiej).
Globalna dostępność GPS, stosunkowo wysoka wiarygodność odczytów oraz brak konieczności posiadania dodatkowej infrastruktury to główne powody, dla których większość współczesnych systemów nawigacji inercyjnej wykorzystuje GPS. INS zazwyczaj charakteryzuje się dużą szybkością aktualizacji i małym, ale nie skrępowanym błędem. Błąd GPS jest ograniczony, jednak czas aktualizacji jest wolny, a estymacja położenia nie jest wiarygodna. Ze względu na zamkniętą architekturę większości modułów GPS najpopularniejszym typem metod fuzji jest tzw. wspomaganie niesprzężone lub luźno sprzężone. INS z GPS jest wykorzystywany w systemach bezpieczeństwa pojazdów do estymacji poślizgu bocznego pojazdu. Standardowe zastosowanie obejmuje prowadzenie pojazdu i nawigację. Sygnał GPS wymaga dobrej widoczności satelitów, co często nie jest możliwe w kanionach, zwłaszcza w miejskich kanionach. Systemy GPS/INS są często wykorzystywane do nawigacji quadrocoptera lub naprowadzania pocisków rakietowych.

Rysunek 9.
Porównanie danych wyjściowych podczas testu stabilności z osi Y żyroskopów dla badanych czujników (MTiG-28, Crista IMU i nasz czujnik). Każda wartość na wykresie jest wartością średnią z 5 próbek z czujnika.
Opracowaliśmy system nawigacji inercyjnej jako kompletne rozwiązanie nawigacyjne osadzone w pojedynczej płytce PCB. Zawiera on przedstawioną powyżej inercyjną jednostkę pomiarową 10-DOF wraz z modułem GPS (Global Positioning System). W celu skompensowania niskiej dokładności estymacji wysokości przez GPS wbudowano dodatkowy barometr. Opisywany INS pozwala na pomiar kątów w trzech wymiarach, przyspieszeń również w trzech wymiarach, kierunku najsilniejszego sygnału magnesu oraz temperatury otoczenia. Wykorzystuje on technologię MEMS w celu zmniejszenia zarówno rozmiarów jak i wagi czujnika. Płytka drukowana INS ze złączem MCX waży 3,67 grama bez montażu i 8,86 grama ze standardowym montażem.
Dane pomiarowe z czujnika w zależności od wersji mogą być przesyłane przez magistralę USB lub CAN, które są typowymi standardami przemysłowymi przesyłu danych. Elastyczność jest wymagana od nowoczesnych czujników w celu zintegrowania ich z istniejącymi systemami. Z tego samego powodu czujnik posiada elastyczną konfigurację danych wyjściowych. Dane wyjściowe z czujnika mogą być pobierane w trzech wersjach: jako surowe dane z czujnika, jako dane po kalibracji i kompensacji temperaturowej lub jako wyjście filtra przetwarzającego. Dane z czujników mogą być również dostarczane w różnych postaciach do użytkownika. Pierwszą formą jest macierz obrotu, która jest generowana na podstawie danych z urządzenia. Dane mogą być również dostarczane do użytkownika końcowego w postaci kątów Eulera i ich wartości podawanych w stopniach lub radianach. Trzecim rodzajem reprezentacji danych wyjściowych jest wykorzystanie kwaternionów. Współrzędne pozycji wyjściowej z GPS są przesyłane w układzie współrzędnych ECEF (Earth Centered Earth Fixed). Jednostką szacowanej przez GPS prędkości jest m/s. Zastosowany wbudowany wysokościomierz ciśnienia atmosferycznego charakteryzuje się wewnętrzną kompensacją temperatury. Umożliwia on pomiar ciśnienia atmosferycznego w zakresie od 20 do 110 kPa z rozdzielczością 1,5 Pa. Za jego pomocą można oszacować wysokość położenia czujnika z rozdzielczością 30cm. Lokalizacja geograficzna czujnika jest obliczana za pomocą modułu GPS. GPS jest połączony z mikroprocesorem za pomocą szeregowej magistrali komunikacyjnej. W celu poprawy jakości estymacji współrzędnych możliwe jest przekazanie do GPS poprawek różnicowych (DGPS). Wyjście z GPS jest w układzie współrzędnych ECEF (Earth Centered Earth Fixed), a częstotliwość 10 Hz.
Prezentowany czujnik INS ma objętość poniżej 4cm3 z obudową i waży 8,86 . Taka wielkość czujnika może pozwolić projektantom robotów na przejście od urządzeń o znacznych rozmiarach do konstrukcji w skali mikro. Maksymalne przyspieszenie jakie jest w stanie wytrzymać czujnik to 500 , natomiast napięcie wejściowe wynosi od 3,5 do 8V, a pobór prądu to 50 mA. Istnieją dwa różne typy obudowy, które umożliwiają zamocowanie czujnika w różnych miejscach. Najmniejsza z nich wersja Micro (rys. 10) o wymiarach z mocowaniem 32,7 x 14,9 x 8,0 . Wersja ze złączem MCX (rys. 3b) ma wymiary 32,7 x 14,9 x 12,1 . Objętość wersji rozszerzonej jest mniejsza niż 6cm3. Czujnik może pracować w szerokim zakresie temperatur od -40°C do 80°C.
Pomiary fizyczne wszystkich wersji przedstawiono w Tab.5.

Rysunek 10.
Przednia (a) i tylna (b) strona płytki drukowanej inercyjnego systemu nawigacyjnego ze złączem MCX.
| INS typ | Dim. X | Dim. Y | Dim. Z | Units | Volume |
| Micro version | 32.7 | 14.9 | 8.0 | mm | 3,897 cm3 |
| Wersja rozszerzona | 32,7 | 14.9 | 12,1 | mm | 5,895 cm3 |
| Parametry wspólne | Min. | Typ | Max. | Jednostki | |
| Waga (bez obudowy) | – | 3.67 | – | gram | |
| Waga (w/obudowa) | – | 8.86 | – | gram | |
| Temperatura pracy | -40 | – | 80 | °C | |
| Temperatura przechowywania | -.60 | – | 100 | °C | |
| Maksymalne przyspieszenie | – | 500 | – | g | |
| Napięcie wejściowe | 3.5 | 5,0 | 6,0 | V | |
| Prąd | 40 | 50 | 60 | mA | |
Tabela 5.
Charakterystyka fizyczna czujnika.
Kalibrowane orientacje osi są wygrawerowane i pokolorowane na górnej stronie, jak przedstawiono na Rys. 11.

Rys. 11.
Schemat montażu INS. a) wersja Micro-Mounting, b) wersja Extended.
Wprowadzony INS został porównany z najmniejszym IMU o objętości poniżej 2 . Na rys. 12ab zaznaczono osie wymiarów i wielkości. Wymiar X mikro IMU 5 wynosi 18,6 co stanowi około 57% wielkości INS. Wymiar Y wynosi 14.7, co stanowi około 99% rozmiaru INS, a wymiar Z IMU jest mniej więcej równy 91% rozmiaru wersji Micro INS i 60% rozmiaru wersji Extended. Jednakże wersja Extended LEMO IMU ma rozmiar 18, co stanowi 225% wersji micro INS. Porównanie na podstawie objętości pozwala jedynie stwierdzić, że wersja micro INS jest mniej niż dwa razy większa (195% wersji micro IMU).

Rysunek 12.
Porównanie proponowanego INS (b) z najmniejszym na świecie IMU (a). Osie pomiarowe są narysowane na obrazie. c) Porównanie wielkości montażowych prezentowanego INS i IMU, d) Porównanie charakterystyk zewnętrznych proponowanego INS i IMU.
.