Miniaturisation des capteurs
La nécessité d’une miniaturisation croissante des dispositifs électroniques afin de les utiliser dans les outils de tous les jours, les robots miniatures et les drones est prévue d’être arrêtée pendant quelques années avant de sauter plus loin des dispositifs de taille micro à nanométrique. C’est pourquoi les unités de mesure inertielle actuellement disponibles sur le marché doivent être revues. Il existe de nombreuses unités de mesure inertielle commerciales disponibles sur le marché. Par exemple, 3DM-GX 1 de MicroStrain, MTi-G de Xsens Technologies, Crista IMU de Cloud Cap Technology, μNAV de Crossbow Technology, AHRS200AV2.5 de Rotomotion et ADIS 16400/405 d’Analog Devices. Afin de vérifier les capacités des solutions mentionnées, nous avons comparé leurs caractéristiques avec l’état actuel de l’art des IMU MEMS miniatures 5 développés par les auteurs du texte. La comparaison est visible dans l’onglet. 1.
L’état actuel de l’art IMU 5 10-DOF permet de mesurer les angles en trois dimensions, les accélérations également en trois dimensions, la direction du signal magnétique le plus fort et la température de l’environnement. Il utilise la technologie MEMS afin de réduire à la fois la taille et le poids du capteur. Le capteur ne pèse que 1,13 sans montage et 3,13 avec le montage standard.
Les données de mesure du capteur IMU 5 selon la version peuvent être envoyées par le bus USB ou CAN ou RS-232 qui sont des standards industriels typiques de transfert de données. La flexibilité est requise des capteurs modernes afin de l’intégrer dans un système existant. Pour la même raison, le capteur possède une configuration flexible des données de sortie. La sortie du capteur peut être acquise en trois versions : en tant que données brutes du capteur, en tant que données après calibration et compensation de température, ou en tant que sortie de filtre de traitement. Les données provenant des capteurs peuvent également être fournies à l’utilisateur sous différentes formes. La première forme est la matrice de rotation, qui est générée sur la base des données provenant du dispositif. Les données peuvent également être fournies à l’utilisateur sous la forme d’angles d’Euler et leurs valeurs données en degrés ou en radians. Le troisième type de représentation des données de sortie se fait par l’utilisation de quaternions.
Le schéma de fonctionnement de l’unité de micro mesure est présenté dans la fig. 3 et les caractéristiques internes dans le tab. 2.
Un des capteurs inertiels fondamentaux est le gyroscope mesurant la vitesse angulaire Ω (dans le schéma GYRO(X), GYRO(Y), GYRO(Z)). Ces capteurs ont été orientés de manière à ce que leurs axes de mesure créent un système de coordonnées cartésiennes à droite. La sortie des signaux analogiques de type MEMS est filtrée par un filtre passe-bas configurable (12,5, 25, 50, 110 Hz). Après filtrage, le signal est converti en forme numérique par un convertisseur analogique-numérique caractérisé par une résolution de 16 bits. Le signal numérique peut être encore filtré par des filtres passe-bas et passe-haut configurables. La fréquence des données provenant des gyroscopes peut être réglée sur 100, 200, 400 ou 800 Hz. La résolution des mesures peut être configurée avec une précision modifiée dans la gamme de 250 °/s à 2000 °/s.
Un autre élément important du schéma est le bloc de capteurs d’accélérations linéaires (dans le schéma ACC(X), ACC(Y), ACC(Z)). Les capteurs ont été orientés de telle sorte que les axes de mesure créent également un système de coordonnées cartésiennes à droite. Les signaux analogiques provenant de la sortie MEMS des capteurs ont été redirigés vers le filtre, puis vers le convertisseur analogique-numérique. La résolution maximale des accélérations mesurées peut être configurée à ±2/±4/±8 (g ≇9.81m/s2). La sensibilité des accéléromètres a été mesurée à 1 .
| Producteur | MicroStrain | Xsens Technologies | Cloud Cap. Technology |
| Modèle | 3DM-GX1 | MTi-G | Crista IMU |
| Capteurs internes | accéléromètres, gyroscopes, magnétomètres, capteur de température | accéléromètres, magnétomètres, gyroscopes, GPS | accéléromètres, gyroscopes, capteur de température |
| Gyroscopes gamme | ± 300°/sec | ± 300°/sec | ± 300°/sec |
| Plage des accéléromètres | ± 5 g | ± 5 g | ± 10 g |
| Sortie numérique | RS-232, RS-485 | RS-232, USB | RS-232, CAN |
| Plage de température | -40°C à +70°C | -20°C à +60°C | -40°C à +70°C |
| Taille avec montage | 64x90x25 | 58x58x33 | 52.07×38,8×25,04 |
| Poids | 75 | 68 | 38.6 |
| Producteur | Crossbow Technology | Dispositifs analogiques | Rotomotion |
| Modèle | μNAV | ADIS 16400/405 | AHRS200AV2.5 |
| Capteurs internes | accéléromètres, gyroscopes, magnétomètres, capteur de température, GPS | accéléromètres, magnétomètres, gyroscopes, capteur de température | accéléromètres, gyroscopes, magnétomètres |
| Gyroscopes gamme | ± 150°/sec | ± 75-300°/sec | ± 90°/sec |
| Plage des accéléromètres | ± 2 g | ± 18 g | ± 2 g |
| Sortie numérique | RS-232 | SPI | RS-232, Ethernet |
| Plage de température | -5°C à +45°C | -40°C à +85°C | -5°C à +75°C |
| Taille avec montage | 57x45x11 | 31.9×23.5×22.9 | « />100x100x100 |
| Poids | 33 | 16 | « />100 |
Tableau 1.
Comparaison des unités de mesure inertielle miniatures actuellement disponibles sur le marché.

Figure 3.
Le schéma de fonctionnement de l’IMU.
Le bloc fonctionnel suivant mesure le champ magnétique terrestre en utilisant des magnétomètres (dans le schéma MAG(X), MAG(Y), MAG(Z)). Les axes de mesure des capteurs sont orientés dans un système de coordonnées cartésiennes à droite. La sortie analogique des capteurs est connectée à un convertisseur analogique-numérique, puis à un bloc de filtres configurables. Les valeurs maximales possibles à mesurer sont dans la gamme de 1,3 à 81. avec une résolution de 1/1055 .
Le dernier bloc fonctionnel contient un thermomètre qui mesure la température dans l’environnement de l’IMU afin de permettre la compensation de température des lectures des accéléromètres, gyroscopes et magnétomètres.
Tous les blocs fonctionnels sont connectés avec l’unité centrale de traitement marquée dans le schéma uProcessor. Afin de stocker les paramètres nécessaires aux algorithmes, une mémoire supplémentaire a été ajoutée (marquée dans le schéma comme eeprom). L’unité centrale de traitement effectue le filtrage avant que les données soient redirigées vers la sortie CAN ou USB ou RS-232. Afin d’établir les paramètres de l’algorithme de filtrage, la phase de calibration est nécessaire.
| Capteurs internes | accéléromètres, gyroscopes, magnétomètres, capteur de température | Gyroscopes plage | de ± 250 à 2000°/sec |
| Accéléromètres plage | de ± 2 à ± 8 g | Sortie numérique | CAN, USB ou RS-232 |
Tableau 2.
Caractéristiques internes de l’unité de mesure inertielle présentée.
Le volume du capteur IMU présenté est inférieur à 2cm3 avec le boîtier et pèse 3,13. Une telle taille du capteur peut permettre aux concepteurs de robots de passer des dispositifs de taille considérable aux conceptions de l’échelle micro. L’accélération maximale que le capteur est capable de supporter est de 500 , tandis que la tension d’entrée est de 3,5 à 8V, et la consommation de courant est de 35 mA. Il existe trois types différents de boîtier qui permettent de fixer le capteur à différents endroits. Le plus petit est la version Micro (fig. 4) dont les dimensions avec montage sont de 18,6 x 14,7 x 7,3 . La version avec les trous de fixation supplémentaires de la version Micro-Mounting (fig. 5a) est de 18,6 x 20,7 x 7,3 . Le câble de sortie des boîtiers de la version Micro et de la version Micro-Mounting est équipé d’un connecteur USB ou RS-TTL selon la version. Il existe également une version étendue avec des trous de fixation et un connecteur LEMO intégré dans le boîtier (fig. 5b). Ses dimensions sont de 32,0 x 18,0 x 16,5 .
Les mesures physiques de toutes les versions sont présentées dans le Tab.3..

Figure 4.
Les faces avant et arrière de l’unité de mesure inertielle.
Les orientations des axes calibrés sont gravées et colorées sur la face supérieure comme présenté sur la figure 5. La taille du montage unique est de 6,15 mm pour la version Micro-Mounting, et de 6,50 mm pour la version LEMO étendue.
Avant l’application de l’IMU dans les objets physiques, une comparaison entre les plus petits capteurs disponibles sur le marché a été faite afin de vérifier la possibilité de navigation des véhicules mobiles autonomes. Les études comparatives ont été conçues pour vérifier les paramètres mis en place dans le prototype, analyser les causes des erreurs de mesure et vérifier comment les capteurs, qui ont effectué les tests, se comportent dans des situations extrêmes. Pour les tests, deux capteurs miniatures commerciaux populaires ont été utilisés : MTiG-28G de XSens Technologies et Crista IMU de Microstrain (fig. 6b).
| Type IMU | Dim. X | Dim. Y | Dim. Z | Unités | Volume |
| Version micro | 18.6 | 14.7 | 7,3 | mm | 1,996 cm3 |
| Version Micro | 18.6 | 20,7 | 7,3 | mm | 2,811 cm3 |
| Version étendue | 32.0 | 16,5 | 18,0 | mm | 9,504 cm3 |
| Paramètres communs | Min. | Type | Max. | Unités | |
| Poids (sans boîtier) | – | 1,13 | – | gramme | |
| Poids (avec boîtier) | – | 3.13 | – | gramme | |
| Température de fonctionnement | -40 | – | 80 | °C | |
| Température de stockage | -60 | – | 100 | °C | |
| Accélération maximale | – | 500 | – | g | |
| Tension d’entrée | 3.5 | 5.0 | 6.0 | V | |
| Courant | 30 | 35 | 40 | mA | |
Tableau 3.
Caractéristique physique du capteur.

Figure 5.
Le schéma de montage du micro-IMU. a) Version micro-montage, b) Version LEMO étendue.

Figure 6.
A) Comparaison de la taille de l’IMU présenté avec les produits disponibles sur le marché, b) plateforme de comparaison des IMU. L’IMU présenté est marqué par l’ellipse rouge. Dans la partie gauche de l’image, on peut voir l’IMU Crista. De l’autre côté, on peut voir l’IMU MtiG de XSense Technologies.
Afin d’effectuer des études comparatives, une plateforme de calibration a été conçue, produite et utilisée (fig. 6b). Tous les IMU testés ont été montés sur la plate-forme et leurs données brutes ont été calibrées sur le système de coordonnées commun à tous les capteurs en utilisant la méthode de calibration présentée. Plusieurs tests ont été effectués : comparaison des données brutes, comparaison des données filtrées, stabilité temporelle des capteurs et capacité de compensation de la température. La figure 7a présente la comparaison des lectures des accéléromètres du capteur IMU présenté (CZK dans le graphique) et du capteur MTiG (MTI dans le graphique) et la figure 7b présente la comparaison des gyroscopes. Les deux comparaisons ont été enregistrées pendant le mouvement.
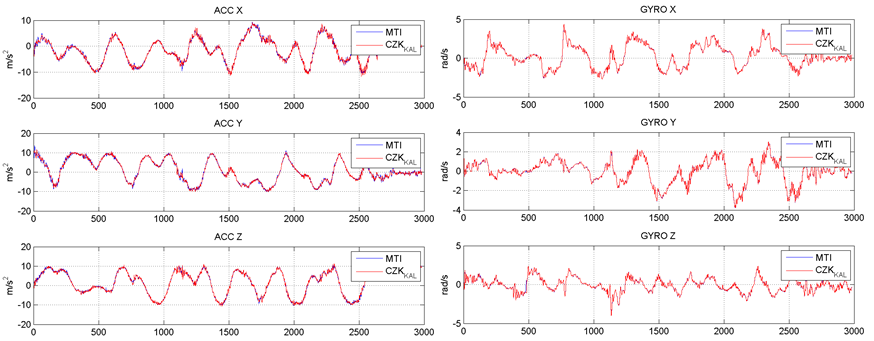
Figure 7.
Un exemple de graphique issu des études comparatives du capteur IMU présenté et des capteurs disponibles sur le marché. Le capteur IMU présenté est étiqueté CZK et le capteur MTiG de XSens Technologies est étiqueté MTI. Les unités de temps sont . a) les lectures des accéléromètres, b) les lectures des gyroscopes.
On peut remarquer que les données de sortie du capteur calibré présenté et du capteur de référence sont presque les mêmes. Afin de mesurer les différences, nous avons estimé le signal à partir des données brutes et l’avons séparé de la composante de bruit. Seul l’axe de mesure Y du gyroscope a été choisi comme exemple pour la présentation. Ce choix a été possible car les résultats obtenus sont comparables quels que soient l’axe et le capteur (magnétomètres, accéléromètres ou gyroscopes). Dans la partie droite de la figure 8, on voit que l’écart-type du bruit pour le MTi-G28 et notre capteur est d’environ 0,04 alors que le résultat du Crista IMU est d’environ 0,12. La différence entre l’écart-type du MTi-G28 et de notre capteur est seulement de 0,0035, ce qui est généralement indiscernable par l’œil humain.
Un tableau supplémentaire de collationnement du coefficient signal/bruit est présenté dans le tab. 4.
Un problème important pour les unités de mesure inertielle est la stabilité temporelle des données de sortie. Nous avons effectué une série de tests de stabilité avec une durée de 4h. Les résultats présentés dans la fig. 9 ont été acquis après avoir fait la moyenne de cinq échantillons de chaque IMU dans le test. Deux observations principales peuvent être faites. Premièrement, les résultats du MTi-G28 et de notre IMU sont comparables. La différence entre les valeurs moyennes obtenues n’est que de 0,00027 et la différence entre les valeurs d’écart-type est de 0,00226, ce qui est encore plus faible que lors du test avec mouvement. La deuxième observation est que les résultats de notre capteur et du MTi-G28 sont plus de 20 fois plus proches de la valeur 0 réelle.

Figure 8.
La comparaison des données de sortie pendant le mouvement de l’axe Y des gyroscopes pour les capteurs testés (MTiG-28, Crista IMU et notre capteur). Les unités de temps sont .
| Crista IMU (S/NKAL) | MTiG (S/ NKAL) | IMU 5 (S/NKAL) | |
| Accéléromètres | 20,3 | 38,1 | 43,2 |
| Magnétomètres | N/A | 719,3 | 767,9 |
| Gyroscopes | 13,6 | 206,7 | 254,5 |
Tableau 4.
La comparaison du coefficient signal/bruit pour les IMUs testés. (Plus la valeur est grande, mieux c’est).
La disponibilité mondiale du GPS, la fiabilité relativement élevée des lectures et l’absence de besoin d’infrastructure supplémentaire sont les principales raisons pour lesquelles la plupart des systèmes de navigation inertielle modernes utilisent le GPS. Les systèmes de navigation inertielle peuvent être caractérisés par un taux de mise à jour rapide et une erreur faible mais non limitée. L’erreur du GPS est limitée, mais le temps de mise à jour est lent et l’estimation de l’attitude n’est pas fiable. En raison de l’architecture fermée de la plupart des modules GPS, le type de méthode de fusion le plus populaire est appelé aide découplée ou faiblement couplée. L’INS et le GPS sont utilisés dans les systèmes de sécurité des véhicules pour l’estimation du dérapage d’un véhicule. L’utilisation standard concerne le guidage et la navigation des véhicules. Le signal GPS nécessite une bonne visibilité des satellites, ce qui n’est souvent pas possible dans les canyons, notamment dans les environnements urbains. Les systèmes GPS/INS sont souvent utilisés pour la navigation d’un quadrocoptère ou le guidage de missiles.

Figure 9.
La comparaison des données de sortie pendant le test de stabilité de l’axe Y des gyroscopes pour les capteurs testés (MTiG-28, Crista IMU et notre capteur). Chaque valeur dans le graphique est une valeur moyenne de 5 échantillons du capteur.
Nous avons développé un système de navigation inertielle comme une solution de navigation complète embarquée dans un seul PCB. Il contient une unité de mesure inertielle 10-DOF présentée ci-dessus accompagnée d’un module de système de positionnement global (GPS). Afin de compenser la faible précision de l’estimation de l’altitude par le GPS, un baromètre supplémentaire a été intégré. L’INS décrit permet de mesurer les angles en trois dimensions, les accélérations également en trois dimensions, la direction du signal magnétique le plus fort et la température de l’environnement. Il utilise la technologie MEMS afin de réduire la taille et le poids du capteur. Le circuit imprimé INS avec connecteur MCX pèse 3,67 grammes sans montage et 8,86 grammes avec le montage standard.
Les données de mesure du capteur selon la version peuvent être envoyées par le bus USB ou CAN qui sont des standards industriels typiques de transfert de données. La flexibilité est requise des capteurs modernes afin de l’intégrer dans un système existant. Pour la même raison, le capteur possède une configuration flexible des données de sortie. La sortie du capteur peut être acquise en trois versions : en tant que données brutes du capteur, en tant que données après calibration et compensation de température, ou en tant que sortie de filtre de traitement. Les données provenant des capteurs peuvent également être fournies à l’utilisateur sous différentes formes. La première forme est la matrice de rotation, qui est générée sur la base des données provenant du dispositif. Les données peuvent également être fournies à l’utilisateur sous la forme d’angles d’Euler et leurs valeurs données en degrés ou en radians. Le troisième type de représentation des données de sortie consiste à utiliser des quaternions. Les coordonnées de position de sortie du GPS sont envoyées dans le système de coordonnées ECEF (Earth Centered Earth Fixed). L’unité de la vitesse estimée par le GPS est le m/s.L’altimètre à pression atmosphérique embarqué utilisé est caractérisé par une compensation interne de la température. Il permet de mesurer la pression atmosphérique dans la plage de 20 à 110 kPa avec une résolution de 1,5 Pa. Il peut être utilisé pour estimer l’altitude du capteur avec une résolution égale à 30 cm. La localisation géographique du capteur est calculée à l’aide du module GPS. Le GPS est connecté au microprocesseur par un bus de communication série. Afin d’améliorer la qualité de l’estimation des coordonnées, il est possible de passer au GPS des corrections différentielles (DGPS). La sortie du GPS est dans le système de coordonnées Earth Centered Earth Fixed (ECEF) et la fréquence est de 10 Hz.
Le volume du capteur INS présenté est inférieur à 4cm3 avec le boîtier et pèse 8,86 . Une telle taille du capteur peut permettre aux concepteurs de robots de passer des dispositifs de taille considérable aux conceptions de l’échelle micro. L’accélération maximale que le capteur est capable de supporter est de 500 , tandis que la tension d’entrée est de 3,5 à 8 V, et la consommation de courant est de 50 mA. Il existe deux types différents de boîtier qui permettent de fixer le capteur à différents endroits. Le plus petit est la version Micro (fig. 10) dont les dimensions avec montage sont de 32,7 x 14,9 x 8,0 . La version avec le connecteur MCX (fig. 3b) est de 32,7 x 14,9 x 12,1 . Le volume de la version étendue est inférieur à 6cm3 . Le capteur peut fonctionner dans une large gamme de températures allant de -40°C à 80°C.
Les mesures physiques de toutes les versions sont présentées dans le Tab.5..

Figure 10.
La face avant (a) et la face arrière (b) du circuit imprimé du système de navigation inertielle avec connecteur MCX.
| INS type | Dim. X | Dim. Y | Dim. Z | Unités | Volume |
| Version micro | 32,7 | 14,9 | 8.0 | mm | 3.897 cm3 |
| Version étendue | 32.7 | 14.9 | 12,1 | mm | 5,895 cm3 |
| Paramètres communs | Min. | Type | Max. | Unités | |
| Poids (sans boîtier) | – | 3.67 | – | gramme | |
| Poids (avec boîtier) | – | 8.86 | – | gramme | |
| Température de fonctionnement | -40 | – | 80 | °C | |
| Température de stockage | -60 | – | 100 | °C | |
| Accélération maximale | – | 500 | – | g | |
| Tension d’entrée | 3.5 | 5.0 | 6.0 | V | |
| Courant | 40 | 50 | 60 | mA | |
Tableau 5.
Caractéristiques physiques du capteur.
Les orientations des axes calibrés sont gravées et colorées sur la face supérieure comme présenté dans la Fig. 11.

Figure 11.
Le schéma de montage INS. a) Version micro-montage, b) Version étendue.
L’INS introduit a été comparé au plus petit IMU avec un volume inférieur à 2 . Les deux axes de mesure et de taille sont marqués dans la fig 12ab. La dimension X du micro-IMU 5 est de 18,6, soit environ 57% de la taille de l’INS. La dimension Y est de 14,7, soit environ 99% de la taille de l’INS et la dimension Z de l’IMU est plus ou moins égale à 91% de la version micro de l’INS et à 60% de la version étendue. Cependant, la version étendue LEMO de l’IMU est de 18, soit 225% de la version micro de l’INS. La comparaison basée sur le volume ne permet que d’affirmer que la version micro de l’INS est moins de deux fois plus grande (195% de la version micro de l’IMU).

Figure 12.
La comparaison de l’INS proposé (b) avec le plus petit IMU du monde (a). Les axes de mesure sont dessinés dans l’image. c) La comparaison de la taille de montage de l’INS et de l’IMU présentés, d) La comparaison des caractéristiques externes de l’INS proposé et de l’IMU.
.