Miniaturisering af sensorer
Behovet for øget miniaturisering af elektronisk udstyr med henblik på at anvende det i hverdagsredskaber, miniature-robotter og UAV’er forventes at blive stoppet i et par år, før der springes yderligere fra mikro- til nanostørrelse. Derfor er der behov for en gennemgang af de inertiale måleenheder, der i øjeblikket findes på markedet. Der findes flere kommercielle inertimåleenheder på markedet. F.eks. 3DM-GX 1 fra MicroStrain, MTi-G fra Xsens Technologies, Crista IMU fra Cloud Cap Technology, μNAV fra Crossbow Technology, AHRS200AV2.5 fra Rotomotion og ADIS 16400/405 fra Analog Devices. For at verificere de nævnte løsningers kapacitet har vi sammenlignet deres egenskaber med den nuværende state of the art miniature MEMS IMU 5, som er udviklet af forfatterne af teksten. Sammenligningen er synlig i fanebladet. 1.
Den nuværende state of the art IMU 5 10-DOF giver mulighed for at måle vinkler i tre dimensioner, accelerationer også i tre dimensioner, retningen af det stærkeste magnetsignal og temperaturen i omgivelserne. Den anvender MEMS-teknologi for at reducere både størrelse og vægt af sensoren. Sensoren vejer kun 1,13 uden montering og 3,13 med standardmontering.
Måledata fra IMU 5-sensoren kan afhængigt af versionen sendes via USB- eller CAN-bus eller RS-232, som er typiske industristandarder for dataoverførsel. Der kræves fleksibilitet af moderne sensorer for at kunne integrere dem i et eksisterende system. Af samme grund har sensoren en fleksibel konfiguration af udgangsdata. Sensorens output kan fås i tre versioner: som rå sensordata, som data efter kalibrering og temperaturkompensation eller som output af et behandlingsfilter. Data fra sensorerne kan også leveres i forskellige former til brugeren. Den første form er en rotationsmatrix, som genereres på grundlag af data fra enheden. Data kan også leveres til slutbrugeren i form af Euler-vinkler og deres værdier angivet i grader eller radianer. Den tredje form for repræsentation af uddata er ved hjælp af quaternioner.
Skemaet for driften af mikromåleenheden er vist i fig. 3 og de interne egenskaber i fanebladet. 2.
En af de grundlæggende inertialsensorer er gyroskopet, der måler vinkelhastigheden Ω (i skemaet GYRO(X), GYRO(Y), GYRO(Z)). Disse sensorer blev orienteret på en sådan måde, at deres måleakser skaber et højrehåndet kartesisk koordinatsystem. Udgangssignaler af analog MEMS-typen filtreres af et konfigurerbart lavpasfilter (12,5, 25, 50, 110 Hz). Efter filtreringen konverteres signalet til digital form ved hjælp af en analog-digitalkonverter med en opløsning på 16 bit. Det digitale signal kan filtreres yderligere ved hjælp af konfigurerbare lav- og højpasfiltre. Frekvensen af data fra gyroskoper kan indstilles til 100, 200, 400 eller 800 Hz. Opløsningen af målingerne kan konfigureres med en ændret præcision i området fra 250 °/s til 2000 °/s.
Et andet vigtigt element i skemaet er blokken med sensorer til lineære accelerationer (i skemaet ACC(X), ACC(Y), ACC(Z)). Sensorerne blev orienteret på en sådan måde, at måleakserne også skaber højrehåndede kartesiske koordinatsystemer. Analoge signaler fra sensorernes MEMS-udgang blev omdirigeret til filteret og videre til den analog-digitale konverter. Den maksimale opløsning af de målte accelerationer kan konfigureres til ±2/±4/±8 (g ≇9,81m/s2). Accelerometrenes følsomhed blev målt som 1 .
| Producent | MicroStrain | Xsens Technologies | Cloud Cap Technology | ||
| Model | 3DM-GX1 | MTi-G | Crista IMU | ||
| Interne sensorer | accelerometre, gyroskoper, magnetometre, temperatursensor | accelerometre, magnetometre, gyroskoper, GPS | accelerometre, gyroskoper, temperaturføler | ||
| Gyroskoper rækkevidde | ± 300°/sek | ± 300°/sek | ± 300°/sek | ± 300°/sek | |
| Accelerometre område | ± 5 g | ± 5 g | ± 5 g | ± 10 g | |
| Digitalt output | RS-232, RS-485 | RS-232, USB | RS-232, CAN | ||
| Temperaturområde | -40°C til +70°C | -20°C til +60°C | -40°C til +70°C | ||
| Størrelse med montering | 64x90x25 | 58x58x33 | 52.07×38.8×25.04 | ||
| Vægt | 75 | 68 | 38.6 | ||
| Producent | Crossbow Technology | Analog Devices | Analog Devices | Rotomotion | |
| Model | μNAV | ADIS 16400/405 | AHRS200AV2.5 | ||
| Interne sensorer | accelerometre, gyroskoper, magnetometre, temperatursensor, GPS | accelerometre, magnetometre, gyroskoper, temperatursensor | accelerometre, gyroskoper, magnetometre | ||
| Gyroskoper rækkevidde | ± 150°/sek | ± 75-300°/sek | ± 90°/sek | ||
| Accelerometre område | ± 2 g | ± 18 g | ± 2 g | ||
| Digital udgang | RS-232 | SPI | RS-232, Ethernet | ||
| Temperaturområde | -5°C til +45°C | -40°C til +85°C | -5°C til +75°C | ||
| Størrelse med montering | 57x45x11 | 31.9×23,5×22,9 | “/>100x100x100x100 | ||
| Vægt | 33 | 16 | “/>100 |
Tabel 1.
Sammenligning af de i øjeblikket på markedet tilgængelige miniature inertimåleenheder.

Figur 3.
Driftsskemaet for IMU’er.
Næste funktionsblok måler jordens magnetfelt ved hjælp af magnetometre (i skemaet MAG(X), MAG(Y), MAG(Z)). Sensorernes måleakser er orienteret i et højrehåndet kartesisk koordinatsystem. Det analoge output fra sensorerne forbindes med en analog-digital-konverter og videre med en konfigurerbar filterblok. De maksimale værdier, der kan måles, ligger i intervallet fra 1,3 til 81. med en opløsning på 1/1055.
Den sidste funktionsblok indeholder et termometer, der måler temperaturen i IMU’ens omgivelser for at muliggøre temperaturkompensation af accelerometre, gyroskoper og magnetometreaflæsninger.
Alle funktionsblokke er forbundet med den centrale procesenhed, der er markeret i skemaet uProcessor. For at lagre de nødvendige parametre til algoritmerne blev der tilføjet yderligere hukommelse (markeret i skemaet som eeprom). CPU’en udfører filtreringen, før dataene videresendes til CAN- eller USB- eller RS-232-udgangen. For at fastlægge parametrene for filtreringsalgoritmen er det nødvendigt med en kalibreringsfase.
| Interne sensorer | accelerometre, gyroskoper, magnetometre, temperaturføler | Gyroskoper spænder | fra ± 250 til 2000°/sek |
| Accelerometre spænder | fra ± 2 til ± 8 g | Digitalt output | CAN, USB eller RS-232 |
Tabel 2.
Interne karakteristika for den præsenterede inertimåleenhed.
Den præsenterede IMU-sensorvolumen er under 2 cm3 med hus og vejer 3,13. En sådan størrelse af sensoren kan give designere af robotter mulighed for at gå fra enheder af betydelig størrelse til design i mikroskalaen. Den maksimale accelerationssensor er i stand til at modstå er 500 , mens indgangsspændingen er fra 3,5 til 8V, og strømforbruget er 35 mA. Der er tre forskellige typer af huset, der gør det muligt at fastgøre sensoren på forskellige steder. Den mindste Micro-version (fig. 4) størrelse med montering er 18,6 x 14,7 x 7,3 . Version med de ekstra monteringshuller Micro-Mounting-versionen (fig. 5a) er 18,6 x 20,7 x 7,3 . Husene i Micro-versionen og Micro-Mounting-versionen er udstyret med et USB- eller RS-TTL-stik afhængigt af versionen. Der findes også en udvidet version med monteringshuller og et LEMO-stik indlejret i huset (fig. 5b). Dens størrelse er 32,0 x 18,0 x 16,5 .
Fysiske mål for alle versioner er vist i tab.3.

Figur 4.
Figur 4.
Forside og bagside af den inertielle måleenhed.
De kalibrerede aksers orienteringer er indgraveret og farvelagt på oversiden som vist i fig. 5. Størrelsen af den enkelte montering er 6,15 mm for Micro-Mounting-versionen og 6,50 mm for Extended LEMO-versionen.
Forud for anvendelsen af IMU’en i de fysiske objekter blev der foretaget en sammenligning mellem de mindste tilgængelige sensorer på markedet for at verificere muligheden for navigation af autonome mobile køretøjer. Sammenlignende undersøgelser blev designet til at kontrollere de parametre, der er opstillet i prototypen, analysere årsagerne til målefejl og kontrollere, hvordan de sensorer, som udførte test, opfører sig i ekstreme situationer. Til testene blev der anvendt to populære kommercielle miniatursensorer: MTiG-28G fra XSens Technologies og Crista IMU fra Microstrain (fig. 6b).
| IMU type | Dim. X | Dim. Y | Dim. Z | Enheder | Volume | |
| Mikroversion | 18.6 | 14.7 | 7,3 | 7,3 | mm | 1,996 cm3 |
| Mikromonteringsudgave | 18.6 | 20,7 | 7,3 | mm | 2,811 cm3 | |
| Udvidet version | 32.0 | 16,5 | 18,0 | mm | 9.504 cm3 | |
| Fælles parametre | Min. | Type | Max. | Enheder | ||
| Vægt (uden hus) | – | 1,13 | – | gram | ||
| Vægt (med hus) | – | 3.13 | – | gram | ||
| Betjeningstemperatur | -40 | – | 80 | °C | ||
| Lagertemperatur | -60 | – | 100 | °C | ||
| Maximal acceleration | – | 500 | – | g | ||
| Inputspænding | 3.5 | 5,0 | 6,0 | V | ||
| Størrelse | 30 | 35 | 40 | mA | ||
Tabel 3.
Fysisk karakteristik af sensoren.

Figur 5.
Mikro-IMU-monteringsskemaet. a) Micro-Mounting-version, b) Udvidet LEMO-version.

Figur 6.
A) Sammenligning af den præsenterede IMU-størrelse med de produkter, der findes på markedet, b) IMU-sammenligningsplatform. Den præsenterede IMU er markeret med den røde ellipse. I venstre side af billedet kan Crista IMU ses. På den anden side kan man se MtiG Imu fra XSense Technologies.
For at kunne foretage sammenlignende undersøgelser blev der designet, fremstillet og anvendt en kalibreringsplatform (fig. 6b). Alle de testede IMU’er blev monteret på platformen, og deres rådata blev kalibreret til det fælles koordinatsystem for alle sensorerne ved hjælp af den præsenterede kalibreringsmetode. Der blev foretaget flere test: sammenligning af rådata, sammenligning af filtrerede data, sensorernes tidsstabilitet og evne til temperaturkompensation. I fig. 7a er vist en sammenligning af aflæsningerne fra accelerometrene fra den præsenterede IMU-sensor (CZK i diagrammet) og MTiG-sensoren (MTI i diagrammet), og i fig. 7b er vist en sammenligning af gyroskoper. Begge sammenligninger blev optaget under bevægelse.
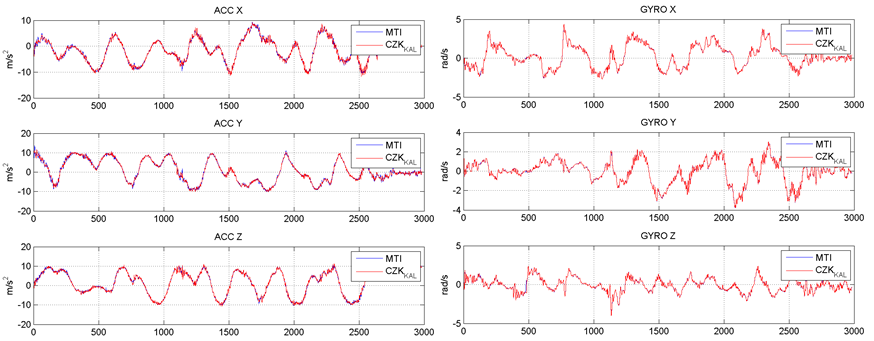
Figur 7.
Eksempel på diagram fra sammenlignende undersøgelser af den præsenterede IMU-sensor og de sensorer, der er tilgængelige på markedet. Den præsenterede IMU-sensor er mærket med CZK og MTiG-sensoren fra XSens Technologies er mærket med MTI. Tidenhederne er . a) aflæsningerne fra accelerometrene, b) aflæsningerne fra gyroskoperne.
Det kan bemærkes, at outputdataene fra den præsenterede kalibrerede sensor og referencesensoren er næsten de samme. For at kunne måle forskellene har vi estimeret signalet fra rå data og adskilt det fra støjkomponenten. Kun gyroskopets Y-måleakse blev valgt som et eksempel til præsentation. Dette valg var muligt, fordi de opnåede resultater er sammenlignelige uanset aksen og sensoren (magnetometre, accelerometre eller gyroskoper). I den højre del af fig. 8 vises det, at standardafvigelsen af støjen for MTi-G28 og vores sensor er ca. 0,04, mens Crista IMU’s resultat er ca. 0,12. Forskellen mellem standardafvigelsen for MTi-G28 og vores sensor er kun 0,0035, hvilket normalt ikke kan skelnes med det menneskelige øje.
Den supplerende tabel med en oversigt over signal/støjkoefficienten er vist i tab. 4.
Et vigtigt problem for inertiale måleenheder er tidsstabiliteten af uddataene. Vi har udført en række stabilitetstest af en varighed på 4 timer. De resultater, der er vist i fig. 9, blev opnået efter gennemsnitlig beregning af fem prøver for hver IMU i testen. Der kan gøres to hovedobservationer. For det første er resultaterne fra MTi-G28 og vores IMU sammenlignelige. Forskellen mellem de opnåede gennemsnitsværdier er kun 0,00027, og forskellen mellem standardafvigelsesværdierne er 0,00226, hvilket er endnu lavere end under testen med bevægelse. Den anden observation er, at vores sensor- og MTi-G28-resultater er mere end 20 gange tættere på den reelle 0-værdi.

Figur 8.
Sammenligning af outputdata under bevægelse fra Y-aksen af gyroskoper for de testede sensorer (MTiG-28, Crista IMU og vores sensor). Tidenhederne er .
| Crista IMU (S/NKAL) | MTiG (S/ NKAL) | IMU 5 (S/NKAL) | ||
| Accelerometre | 20,3 | 38,1 | 43,2 | |
| Magnetometre | N/A | 719,3 | 767,9 | |
| Gyroskoper | 13,6 | 206,7 | 254,5 |
Tabel 4.
Sammenligning af signal/støjkoefficienten for de afprøvede IMU’er. (Jo større værdi, jo bedre).
Den globale tilgængelighed af GPS, den relativt høje pålidelighed af aflæsningerne og intet behov for yderligere infrastruktur er hovedårsagerne til, at de fleste moderne inertialnavigationssystemer anvender GPS. INS kan typisk karakteriseres ved en hurtig opdateringshastighed og en lille, men ubegrænset fejl. GPS-fejlen er begrænset, men opdateringstiden er langsom, og holdningsvurderingen er ikke pålidelig. På grund af den lukkede arkitektur i de fleste GPS-moduler er den mest populære type fusionsmetode den såkaldte ukoblede eller løst koblede hjælpemetode. INS med GPS anvendes i køretøjssikkerhedssystemer til vurdering af et køretøjs sideslip. Den almindelige anvendelse omfatter køretøjsstyring og navigation. GPS-signalet kræver en klar synlighed af satellitterne, hvilket ofte ikke er muligt i kløfter, især ikke i kløftmiljøer i byområder. GPS/INS-systemerne anvendes ofte til navigation af en quadrocopter eller til styring af missiler.

Figur 9.
Sammenligningen af outputdataene under stabilitetstesten fra Y-aksen af gyroskoper for de testede sensorer (MTiG-28, Crista IMU og vores sensor). Hver værdi i diagrammet er en gennemsnitsværdi af 5 prøver fra sensoren.
Vi har udviklet et inertialnavigationssystem som en komplet navigationsløsning, der er indlejret i et enkelt printkort. Det indeholder 10-DOF inertimåleenhed, der er præsenteret ovenfor, ledsaget af et GPS-modul (Global Positioning System). For at kompensere for den lave præcision af GPS’ens højdevurdering blev der indlejret et ekstra barometer. Den beskrevne INS gør det muligt at måle vinkler i tre dimensioner, accelerationer også i tre dimensioner, retningen af det stærkeste magnetsignal og temperaturen i omgivelserne. Den anvender MEMS-teknologi for at reducere både sensorens størrelse og vægt. INS printkortet med MCX-stik vejer 3,67 gram uden montering og 8,86 gram med standardmontering.
Måledata fra sensoren kan afhængigt af versionen sendes via USB- eller CAN-bus, som er typiske industristandarder for dataoverførsel. Der kræves fleksibilitet af moderne sensorer for at kunne integrere dem i et eksisterende system. Af samme grund har sensoren en fleksibel konfiguration af udgangsdata. Sensorens output kan fås i tre versioner: som rå sensordata, som data efter kalibrering og temperaturkompensation eller som output af et behandlingsfilter. Data fra sensorerne kan også leveres i forskellige former til brugeren. Den første form er en rotationsmatrix, som genereres på grundlag af data fra enheden. Data kan også leveres til slutbrugeren i form af Euler-vinkler og deres værdier angivet i grader eller radianer. Den tredje form for repræsentation af uddata er ved hjælp af quaternioner. Outputpositionskoordinaterne fra GPS’en sendes i det jordcentrerede, jordfaste koordinatsystem (ECEF). Enheden for den af GPS’en estimerede hastighed er m/s. Den anvendte indbyggede atmosfæriske trykhøjdemåler er kendetegnet ved intern temperaturkompensation. Den gør det muligt at måle det atmosfæriske tryk i området fra 20 til 110 kPa med en opløsning på 1,5 Pa. Den kan bruges til at estimere sensorens højde med en opløsning på 30 cm. Sensorens geografiske lokalisering beregnes ved hjælp af GPS-modulet. GPS’en er forbundet med mikroprocessoren via en seriel kommunikationsbus. For at forbedre kvaliteten af koordinateskønnet er det muligt at overføre differentielle korrektioner (DGPS) til GPS. Output fra GPS’en er i ECEF-koordinatsystemet (Earth Centered Earth Fixed), og frekvensen er 10 Hz.
Den præsenterede INS-sensor har et volumen på under 4 cm3 med hus og vejer 8,86 . En sådan størrelse af sensoren kan give designere af robotter mulighed for at gå fra enheder af betydelig størrelse til design i mikroskala. Den maksimale accelerationssensor er i stand til at modstå er 500 , mens indgangsspændingen er fra 3,5 til 8V, og strømforbruget er 50 mA. Der er to forskellige typer af huset, der gør det muligt at fastgøre sensoren på forskellige steder. Den mindste Micro-version (fig. 10) størrelse med montering er 32,7 x 14,9 x 8,0 . Version med MCX-stik (fig. 3b) er 32,7 x 14,9 x 12,1 . Volumenet af den udvidede version er under 6 cm3 . Sensoren kan fungere i et bredt temperaturområde fra -40°C til 80°C.
Fysiske målinger for alle versioner er vist i tab.5.

Figur 10.
Front (a) og bagside (b) af inertialnavigationssystemets PCB med MCX-stik.
| INS type | Dim. X | Dim. Y | Dim. Z | Enheder | Volume | ||
| Micro version | 32.7 | 14.9 | 8.0 | mm | 3.897 cm3 | ||
| Udvidet version | 32.7 | 14.9 | 12,1 | 12,1 | mm | 5,895 cm3 | |
| Fælles parametre | Min. | Type | Max. | Enheder | |||
| Vægt (uden hus) | – | 3.67 | – | gram | |||
| Vægt (m/hus) | – | 8.86 | – | gram | |||
| Betjeningstemperatur | -40 | – | 80 | °C | |||
| Lagertemperatur | -60 | – | 100 | °C | |||
| Maximal acceleration | – | 500 | – | g | |||
| Inputspænding | 3.5 | 5,0 | 6,0 | V | |||
| Størrelse | 40 | 50 | 60 | mA | |||
Tabel 5.
Fysiske karakteristika for sensoren.
Kalibrerede aksers orienteringer er indgraveret og farvet på oversiden som vist i fig. 11.

Figur 11.
SIMonteringsskemaet for INS. a) Micro-Mounting-version, b) Udvidet version.
Det introducerede INS blev sammenlignet med den mindste IMU med et volumen på under 2 . Både måle- og størrelsesakserne er markeret i fig. 12ab. X-dimensionen af mikro-IMU 5 er 18,6, hvilket svarer til ca. 57 % af INS’ets størrelse. Y-dimensionen er 14,7, hvilket svarer til ca. 99 % af INS-størrelsen, og IMU’ens Z-størrelse svarer mere eller mindre til 91 % af mikroversionen af INS’en og 60 % af den udvidede version. Den udvidede LEMO-version af IMU’en er imidlertid 18, hvilket svarer til 225 % af mikroversionen af INS’en. En sammenligning baseret på volumen giver kun mulighed for at fastslå, at mikroversionen af INS’en er mindre end to gange større (195 % af mikroversionen af IMU’en).

Figur 12.
Sammenligningen af det foreslåede INS (b) med verdens mindste IMU (a). Måleakserne er tegnet ind i billedet. c) Sammenligning af monteringsstørrelsen af det præsenterede INS og IMU’en. d) Sammenligning af de ydre egenskaber ved det foreslåede INS og IMU’en.