Indholdsfortegnelse
Indledning
Køretøjets dynamik er en integreret del af et motorkøretøj, som er lige så vigtig som et køretøjs drivlinje, Hvis vi har brug for en drivlinje til at drive et køretøj, har vi også brug for køretøjsdynamiske systemer for at holde køretøjet stabilt kørende, Som vi ved, er affjedringssystemet den del af køretøjets dynamik, der giver køretøjet overfladekontakt og stabilitet ved drejning, men lad os bare tænke på, at køretøjets drejning af retningen, mens det bevæger sig, medfører mange kræfter, der forstyrrer køretøjets stabilitet, hvilket giver anledning til mange spørgsmål som: Hvordan gøres det?. Hvad er kravene for at styre køretøjet i den ønskede retning? For at finde disse svar skal vi studere yderligere.
Et styresystem i en bil er en integreret del af køretøjets dynamik, hvor en række mekaniske komponenter med visse vigtige vinkler samles for at styre køretøjets forhjul i overensstemmelse med input fra passageren via rattet.
Og servostyringssystemet er et avanceret styresystem, hvor den krævede kraft, der kræves for at styre køretøjets forhjul fra side til side, reduceres ved hjælp af elektriske eller hydrauliske anordninger, der multiplicerer den kraft, som føreren anvender via rattet, for at opnå et jævnt og hurtigt retningsskifte af køretøjet.
I dag er alle 80 % af bilerne på vejene udstyret med servostyring, som er blevet det grundlæggende behov i nutidens biler.
Efter indførelsen af servostyring i 1903 har det vist sig, at antallet af ulykker på vejene er faldet til den mærkbare grænse, hvilket igen gør det til en nødvendighed i et firehjulstræk.
Hvorfor har vi brug for servostyring?
Som vi allerede har diskuteret ovenfor, mindsker en servostyring styringsindsatsen, hvilket er behovet for et 4-hjulet bilkøretøj, så vi har brug for en servostyring på grund af følgende grunde
- Hurtig reaktion- Da antallet af køretøjer på vejen stiger dag for dag, og i dag har næsten 60 % af verdens familier en 4-hjulet bil i deres hjem, Med denne stigning i antallet af køretøjer øges også faren for ulykker på vejene, så for at undgå denne fare og for at kunne foretage de hurtige sving, som vejforholdene kræver, er det nødvendigt med et styresystem med hurtig reaktion i et firehjulet køretøj.
- Styretøjsindsats – Hvis vi kører i gamle biler som Maruti Suzuki 800 , viser det sig, at bilens rat føles meget hårdt at dreje, når køretøjet kører under 40 km/t (derover føles styretøjet mindre hårdt), hvilket medfører træthed hos føreren på en lang køretur. Derfor bør et køretøj være udstyret med et servostyringssystem, således at den krævede styrekraft for at styre forhjulene kan reduceres.
- Stødstyring – Som bekendt reduceres vejens ujævnheder af affjedringssystemet, men da styresystemet er direkte fastgjort til hjulnavet, overføres en vis mængde ujævnheder også til styresystemet, som til gengæld forsøger at styre køretøjet mod førerens vilje, hvilket kan medføre, at køretøjet mister sin stabilitet, Selv om bumpstyringen kan styres mekanisk ved at give optimal skraberadius (vinkel mellem hjulets midterlinje og akselakslens hældning), styrer servostyringen den på en mere effektiv måde.
- Tilbagevendende evne – efter at have taget et sving konstateres det, at styretøjet automatisk vender tilbage til sin oprindelige position, hvilket igen automatisk retter det kørende køretøj op. Et køretøj, der er udstyret med servostyring, giver en bedre tilbagelægningsevne til styresystemet.
Læs også:
Hvordan fungerer en motor med frit stempel?
Typer af gearkasser – fuldstændig forklaring
Hvordan fungerer et antiblokeringssystem (ABS)?
Typer af servostyringssystem
På grundlag af den metode, der anvendes til at multiplicere styringskraften, er der 3 typer servostyringssystemer, som er-
1. Hydraulisk servostyringssystem- Det er den type servostyringssystem, hvor der anvendes et hydraulisk system med en hydraulisk pumpe, der drives af motoren og hydrauliske cylindre, til at multiplicere styretøjets indgangskraft, hvilket igen reducerer den krævede indsats for at styre køretøjets forhjul.
- Der anvendes en stærkt komprimeret hydraulisk væske inde i den hydrauliske cylinder, der lægger pres på styretøjet.
2. Elektro – hydraulisk servostyring – Det er den modificerede version af det hydrauliske system, hvor den roterende hydrauliske pumpe, som drives af motoren i den hydrauliske servostyring, erstattes af den hydrauliske pumpe, som drives af elmotoren.
- Det kaldes også for hybrid servostyring på grund af brugen af både hydrauliske og elektriske komponenter.
3. Elektronisk servostyring- Det er den nyeste type servostyring, hvor det hydrauliske system fra den hydrauliske servostyring er fuldstændig erstattet med elmotorer og elektriske sensorer, i stedet for at bruge hydraulisk kraft ,bruges motoren drevet af køretøjets batteri til at påføre kraft på styretøjet, og det drejningsmoment, der leveres af motoren, styres af de sensorer, der registrerer styresøjlens position.
- Styretøjet reagerer hurtigt og meget effektivt på dette system, og derfor anvendes det i næsten alle nye biler i dag.
Vigtige komponenter
De vigtige dele i et servostyringssystem er-
1. Styringsmekanisme- Normalt anvendes tandhjulsstyringsmekanisme i servostyring, hvor rattets rotationsbevægelse omdannes til hjulenes tværgående bevægelse ved hjælp af et sæt konstant indgrebede snekkegear kaldet tandstang, der giver tværgående bevægelse, og et tandhjul, der giver rotationsbevægelse.
2. Forbindelser – De er de mekaniske begrænsninger, der giver en relativ bevægelse mellem 2 komponenter, og den type forbindelser, der anvendes i servostyring, er trækveje, der forbinder tandstangen med hjulets knæk for at overføre tandstangens tværgående bevægelse til hjulene.
3. Kraftanordning – Som vi allerede har diskuteret ovenfor, anvendes en kraftmultiplikatoranordning (enten hydraulisk eller hybrid eller elektrisk) til at multiplicere styretøjets kraft for at reducere styringsindsatsen. Denne anordning er fastgjort til tandhjulet i tandstangsmekanismen.
4. Rat- Et rundt rat anvendes inde i et cockpit (betjent af føreren), som giver det roterende styreinput til de yderligere styreanordninger med henblik på at styre køretøjet.
Servostyringssystemets virkemåde
Servostyringssystemets virkemåde varierer med forskellen på de anvendte kraftmultiplikatoranordninger. så for at forstå servostyringens virkemåde skal alle 3 metoder behandles særskilt.
1. Hydraulisk servostyringssystem
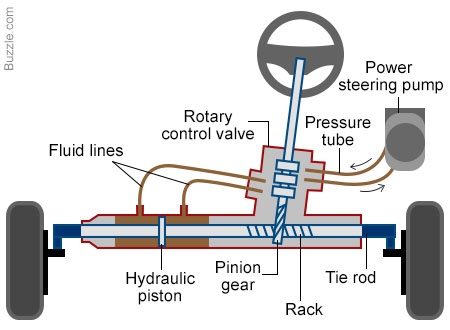
Billedkilde
I denne type servostyringssystem, som vi diskuterede ovenfor, bruges den hydrauliske kraft til at multiplicere styringsindgangskraften for at udjævne styringen af forhjulene, denne hydrauliske kraft genereres af en række komponenter, der omfatter hydraulisk cylinder, rotatorhydraulikpumpe, hydrauliske ledninger, stærkt komprimeret hydraulikvæske og en koblingsmekanisme, der kan koble dette hydrauliske system med styretøjets tandstang.
- Når føreren giver input ved at dreje rattet, begynder den hydrauliske pumpe, der drives af motoren, at pumpe den stærkt komprimerede hydraulikvæske gennem ledninger.
- Det hydrauliske tryk, der produceres af pumpen, går ind i den hydrauliske cylinder, som igen lægger tryk over cylinderens stempel.
- Stemplet, der er under højt tryk, begynder at bevæge sig fra den ene ende til den anden, hvilket igen skubber den videre væske gennem ledningerne, og med denne bevægelse af stemplet ganges den indgående kraft, som føreren anvender, flere gange.
- Denne højtryksvæske, der sendes af den hydrauliske cylinder, udøver derefter tryk på det fastgjorte tandhjul gennem koblingsmekanismen, som igen udøver en høj kraft på tandhjulet, og der sker en styring af forhjulene.
Læs også:
Hvad er CVT – Continuously Variable Transmission og hvordan fungerer det?
Centrifugal Supercharger – Arbejdsprincip, hoveddele, fordele, ulemper med anvendelse
Hvordan fungerer momentomformeren?
2. Hybrid eller semi-hydraulisk servostyringssystem
I denne type servostyringssystem er den hydrauliske pumpe, der drives af motoren fra det hydrauliske servostyringssystem, erstattet med en elektrisk pumpe, hvilket gør det mere pålideligt, dette er den eneste ændring, der er foretaget, resten af dette system fungerer på samme måde som det hydrauliske servostyringssystem, der er nævnt ovenfor.
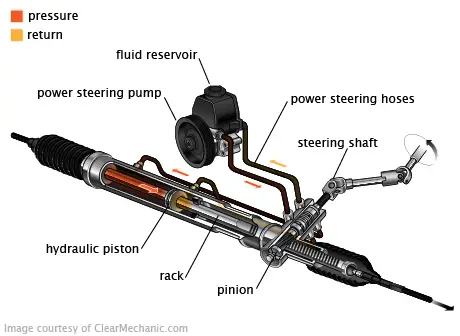
Billedkilde
3. Elektrisk servostyring
Dette system er det nyeste af alle de ovenfor nævnte styresystemer i denne type styresystem, som vi allerede har diskuteret, er kraftmultiplikationen elmotorens funktion i stedet for hydraulisk væske, og dette system fungerer som følger-
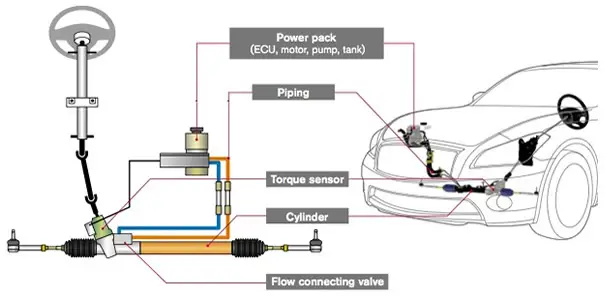
Billedkilde
- Når føreren giver input via rattet, læser de elektroniske sensorer, der er fastgjort til ratstammen, input og sender dem til køretøjets elektriske styreenhed.
- Køretøjets ECU analyserer disse input og sender spændingssignalet til den elektriske motor, der er placeret i enden af ratstammen, hvis tandhjul er i konstant indgreb med tandhjulet.
- På grund af disse spændingssignaler, der sendes af ECU’en, starter motoren, der drives af køretøjets batteri, og leverer et bestemt drejningsmoment i overensstemmelse med værdien af de modtagne spændingssignaler
- Når motoren starter, begynder det tandhjul, der er i konstant indgreb med tandhjulet, at overføre det multiplicerede drejningsmoment til tandhjulet, som igen anvender dette drejningsmoment på den tandstang, hvorigennem det er fastgjort.
- Med dette drejningsmoment, der påføres af tandhjulet over tandstangen, bevæger tandstangen sig, hvilket igen styrer forhjulene (ved hjælp af de fastgjorte trækstænger) i overensstemmelse med kravene.
For at få en bedre forståelse af de forskellige typer servostyringssystemer skal du se videoen nedenfor: