Miniatyrisering av sensorer
Behovet av ökad miniatyrisering av elektronisk utrustning för att kunna använda dem i vardagsverktyg, miniatyrrobotar och UAV:er förväntas stanna upp i några år innan man hoppar vidare från mikro- till nanostorlek. Därför behöver de tröghetsmätare som för närvarande finns tillgängliga på marknaden ses över. Det finns flera kommersiella tröghetsmätare på marknaden. Till exempel 3DM-GX 1 från MicroStrain, MTi-G från Xsens Technologies, Crista IMU från Cloud Cap Technology, μNAV från Crossbow Technology, AHRS200AV2.5 från Rotomotion och ADIS 16400/405 från Analog Devices. För att verifiera kapaciteten hos de nämnda lösningarna har vi jämfört deras egenskaper med den nuvarande tekniska nivån på miniatyr-MEMS-IMU 5 som utvecklats av författarna till texten. Jämförelsen är synlig i fliken. 1.
Den nuvarande moderna IMU 5 10-DOF gör det möjligt att mäta vinklar i tre dimensioner, accelerationer också i tre dimensioner, riktningen för den starkaste magnetsignalen och temperaturen i omgivningen. Den utnyttjar MEMS-teknik för att minska både storlek och vikt på sensorn. Sensorn väger endast 1,13 utan montering och 3,13 med standardmontering.
Mätdata från IMU 5-sensorn kan beroende på version skickas via USB- eller CAN-buss eller RS-232 som är typiska industristandarder för dataöverföring. Flexibiliteten krävs av moderna sensorer för att de ska kunna integreras i befintliga system. Av samma anledning har sensorn en flexibel konfiguration av utgångsdata. Sensorns utgångsdata kan erhållas i tre versioner: som råa sensordata, som data efter kalibrering och temperaturkompensation eller som utgångsdata från ett bearbetningsfilter. Data från sensorerna kan också levereras i olika former till användaren. Den första formen är rotationsmatrisen, som genereras på grundval av data från anordningen. Data kan också levereras till slutanvändaren i form av Eulervinklar och deras värden i grader eller radianer. Den tredje typen av representation av utgångsdata är genom användning av kvaternioner.
Systemet för drift av mikromätningsenheten presenteras i fig. 3 och de interna egenskaperna i tab. 2.
En av de grundläggande tröghetssensorerna är gyroskopet som mäter vinkelhastigheten Ω (i schemat GYRO(X), GYRO(Y), GYRO(Z)). Dessa sensorer var orienterade på ett sådant sätt att deras mätaxlar skapar ett rätvinkligt kartesiskt koordinatsystem. De analoga MEMS-signalerna filtreras av ett konfigurerbart lågpassfilter (12,5, 25, 50, 110 Hz). Efter filtreringen omvandlas signalen till digital form med hjälp av en analog-digitalomvandlare med 16 bitars upplösning. Den digitala signalen kan filtreras ytterligare med konfigurerbara låg- och högpassfilter. Frekvensen för data från gyroskopen kan ställas in till 100, 200, 400 eller 800 Hz. Upplösningen av mätningarna kan konfigureras med en modifierad precision i intervallet 250 °/s till 2000 °/s.
Ett annat viktigt element i schemat är blocket med linjära accelerationssensorer (i schemat ACC(X), ACC(Y), ACC(Z)). Sensorerna orienterades på ett sådant sätt att mätaxlarna också skapar ett rätvinkligt kartesiskt koordinatsystem. Analoga signaler från sensorernas MEMS-utgång omdirigerades till filtret och vidare till den analog-digitala omvandlaren. Den maximala upplösningen för de uppmätta accelerationerna kan konfigureras till ±2/±4/±8 (g ≇9,81m/s2). Accelerometerns känslighet uppmättes till 1 .
| Producent | MicroStrain | Xsens Technologies | Cloud Cap Technology | |
| Model | 3DM-GX1 | MTi-G | Crista IMU | |
| Interna sensorer | accelerometrar, gyroskop, magnetometer, temperatursensor | accelerometer, magnetometer, gyroskop, GPS | accelerometer, gyroskop, temperaturgivare | |
| Gyroskop räckvidd | ± 300°/sek | ± 300°/sek | ± 300°/sek | ± 300°/sek |
| Accelerometerområde | ± 5 g | ± 5 g | ± 10 g | |
| Digitalt utdata | RS-232, RS-485 | RS-232, USB | RS-232, CAN | |
| Temperaturintervall | -40°C till +70°C | -20°C till +60°C | -40°C till +70°C | |
| Storlek med montering | 64x90x25 | 58x58x33 | 52.07×38.8×25.04 | |
| Vikt | 75 | 68 | 38.6 | |
| Producent | Crossbow Technology | Analog Devices | Rotomotion | |
| Modell | μNAV | ADIS 16400/405 | AHRS200AV2.5 | |
| Interna sensorer | accelerometrar, gyroskop, magnetometrar, temperatursensor, GPS | accelerometrar, magnetometrar, gyroskop, temperatursensor | accelerometrar, gyroskop, magnetometrar | |
| Gyroskop räckvidd | ± 150°/sek | ± 75-300°/sek | ± 90°/sek | |
| Accelerometrar intervall | ± 2 g | ± 2 g | ± 18 g | ± 2 g |
| Digitala utgångar | RS-232 | SPI | RS-232, Ethernet | |
| Temperaturintervall | -5°C till +45°C | -40°C till +85°C | -5°C till +75°C | |
| Storlek med montering | 57x45x11 | 31.9×23.5×22.9 | ”/>100x100x100 | |
| Vikt | 33 | 16 | ”/>100 |
Tabell 1.
Genomgång av de tröghetsmätare i miniatyr som för närvarande finns tillgängliga på marknaden.

Figur 3.
Det operativa schemat för IMU.
Nästa funktionsblock mäter jordens magnetfält med hjälp av magnetometrar (i schemat MAG(X), MAG(Y), MAG(Z)). Sensorernas mätaxlar är orienterade i ett högersidigt kartesiskt koordinatsystem. Den analoga utgången från sensorerna ansluts till en analog-digitalomvandlare och vidare till ett konfigurerbart filterblock. Maximala värden som kan mätas ligger i intervallet 1,3-81 med en upplösning på 1/1055.
Det sista funktionsblocket innehåller en termometer som mäter temperaturen i IMU:s omgivning för att möjliggöra temperaturkompensation av avläsningarna från accelerometrar, gyroskop och magnetometrar.
Alla funktionsblock är anslutna till den centrala processorenhet som är markerad i schemat uProcessor. För att lagra de parametrar som krävs för algoritmerna har ytterligare minne lagts till (markerat i schemat som eeprom). CPU:n utför filtreringen innan data omdirigeras till CAN-, USB- eller RS-232-utgången. För att fastställa parametrarna för filtreringsalgoritmen krävs en kalibreringsfas.
| Interna sensorer | accelerometrar, gyroskop, magnetometrar, temperaturgivare | Gyroskopområde | från ± 250 till 2000°/sek |
| Accelerometerområde | från ± 2 till ± 8 g | Digitalt utdata | CAN, USB eller RS-232 |
Tabell 2.
Interna egenskaper hos den presenterade tröghetsmätarenheten.
Den presenterade IMU-sensorns volym är under 2cm3 med hölje och väger 3,13. En sådan storlek på sensorn kan göra det möjligt för konstruktörer av robotar att gå från enheter av betydande storlek till konstruktioner i mikroskala. Maximal acceleration som sensorn klarar av är 500 , medan ingångsspänningen är från 3,5 till 8 V och strömförbrukningen är 35 mA. Det finns tre olika typer av hölje som gör det möjligt att fästa sensorn på olika ställen. Den minsta Micro-versionen (fig. 4) storlek med montering är 18,6 x 14,7 x 7,3 . Version med de extra monteringshålen Micro-Mounting version (fig. 5a) är 18,6 x 20,7 x 7,3 . Höljena i Micro-versionen och Micro-Mounting-versionen är utrustade med en USB- eller RS-TTL-kontakt beroende på version. Det finns också en utökad version med monteringshål och en LEMO-kontakt inbäddad i höljet (fig. 5b). Dess storlek är 32,0 x 18,0 x 16,5 .
Fysiska mått för alla versioner presenteras i tab.3..

Figur 4.
För- och baksidan av tröghetsmätaren.
Kalibrerade axelriktningar är graverade och färgade på ovansidan enligt figur 5. Storleken på den enskilda monteringen är 6,15 mm för Micro-Mounting Version, och 6,50 mm för Extended LEMO version.
För tillämpningen av IMU i de fysiska objekten gjordes en jämförelse mellan de minsta tillgängliga sensorerna på marknaden för att verifiera möjligheten till navigering av autonoma mobila fordon. Jämförande studier utformades för att kontrollera de parametrar som ställdes in i prototypen, analysera orsakerna till mätfel och kontrollera hur de sensorer, som utförde testerna beter sig i extrema situationer. För testerna användes två populära kommersiella miniatyrsensorer: MTiG-28G från XSens Technologies och Crista IMU från Microstrain (fig. 6b).
| IMU typ | Dim. X | Dim. Y | Dim. Z | Enheter | Volym | |
| Mikroversion | 18.6 | 14.7 | 7,3 | mm | 1,996 cm3 | |
| Mikromonteringsversion | 18.6 | 20,7 | 7,3 | mm | 2,811 cm3 | |
| Extended version | 32.0 | 16,5 | 18,0 | mm | 9 504 cm3 | |
| Gemensamma parametrar | Min. | Typ | Max. | Enheter | ||
| Vikt (utan hölje) | – | 1,13 | – | gram | ||
| Vikt (med hölje) | – | 3.13 | – | gram | ||
| Arbetstemperatur | -40 | – | 80 | °C | ||
| Lagringstemperatur | -60 | – | 100 | °C | ||
| Maximal acceleration | – | 500 | – | g | ||
| Inputspänning | 3.5 | 5.0 | 6.0 | V | ||
| Ström | 30 | 35 | 40 | mA | ||
Tabell 3.
Fysiska egenskaper hos sensorn.

Figur 5.
Mikro-IMU-monteringsschemat. a) Micro-Mounting-version, b) Extended LEMO-version.

Figur 6.
A) Jämförelse mellan den presenterade IMU-storleken och de produkter som finns på marknaden, b) IMU-jämförelseplattform. Den presenterade IMU:n är markerad med den röda ellipsen. Till vänster i bilden syns Crista IMU. På andra sidan kan man se MtiG Imu från XSense Technologies.
För att kunna utföra jämförande studier utformades, tillverkades och användes en kalibreringsplattform (fig. 6b). Alla testade IMU:er monterades på plattformen och deras rådata kalibrerades till det gemensamma koordinatsystemet för alla sensorer med hjälp av den presenterade kalibreringsmetoden. Flera tester utfördes: jämförelse av rådata, jämförelse av filtrerade data, sensorernas tidsstabilitet och möjlighet till temperaturkompensation. I fig. 7a visas en jämförelse av avläsningarna från accelerometrarna i den presenterade IMU-sensorn (CZK i diagrammet) och MTiG-sensorn (MTI i diagrammet) och i fig. 7b visas en jämförelse av gyroskopen. Båda jämförelserna registrerades under rörelse.
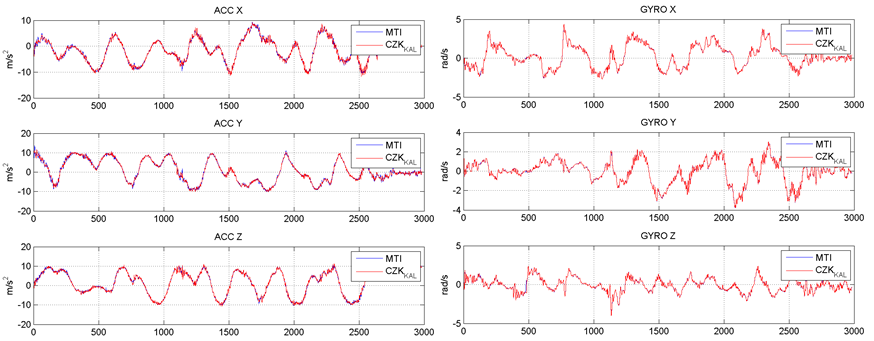
Figur 7.
Ett exempel på ett diagram från jämförande studier av den presenterade IMU-sensorn och de sensorer som finns på marknaden. Den presenterade IMU-sensorn är märkt med CZK och MTiG-sensorn från XSens Technologies är märkt med MTI. Tidsenheterna är . a) avläsningarna från accelerometrarna, b) avläsningarna från gyroskopen.
Det kan noteras att utgångsdata från den presenterade kalibrerade sensorn och referenssensorn är nästan likadana. För att mäta skillnaderna har vi skattat signalen från rådata och separerat den från bruskomponenten. Endast gyroskopets Y-mätningsaxel valdes som exempel för presentationen. Valet var möjligt eftersom de uppnådda resultaten är jämförbara oavsett axel och sensor (magnetometrar, accelerometrar eller gyroskop). I den högra delen av fig. 8 visas att standardavvikelsen av bruset för MTi-G28 och vår sensor är ca 0,04 medan Crista IMU:s resultat är ca 0,12. Skillnaden mellan standardavvikelsen för MTi-G28 och vår sensor är endast 0,0035, vilket vanligtvis inte kan urskiljas med det mänskliga ögat.
En ytterligare tabellsammanställning av signal-bruskoefficienten presenteras i tab. 4.
Ett viktigt problem för tröghetsmätare är tidsstabiliteten hos utgångsdata. Vi har utfört en serie stabilitetstester med en varaktighet på 4 timmar. De resultat som presenteras i fig. 9 har erhållits efter medelvärdesbildning från fem provtagningar för varje IMU i testet. Två huvudsakliga observationer kan göras. För det första är resultaten från MTi-G28 och vår IMU jämförbara. Skillnaden mellan de uppnådda medelvärdena är endast 0,00027 och skillnaden mellan standardavvikelsevärdena är 0,00226, vilket är ännu lägre än under testet med rörelse. Den andra observationen är att våra sensor- och MTi-G28-resultat ligger mer än 20 gånger närmare det verkliga 0-värdet.

Figur 8.
För jämförelse av utgångsdata under rörelse från Y-axeln av gyroskop för de testade sensorerna (MTiG-28, Crista IMU och vår sensor). Tidsenheterna är .
| Crista IMU (S/NKAL) | MTiG (S/NKAL) | IMU 5 (S/NKAL) | |
| Accelerometrar | 20,3 | 38,1 | 43,2 |
| Magnetometrar | N/A | 719,3 | 767,9 |
| Gyroskop | 13,6 | 206,7 | 254,5 |
Tabell 4.
För jämförelse av signal-bruskoefficienten för de testade IMU:erna. (Ju större värde desto bättre).
GPS:s globala tillgänglighet, den relativt höga tillförlitligheten hos avläsningarna och inget behov av ytterligare infrastruktur är de viktigaste skälen till att de flesta moderna tröghetsnavigeringssystem använder GPS. INS kan vanligtvis kännetecknas av snabb uppdateringshastighet och små men obundna fel. GPS-felet är begränsat, men uppdateringstiden är långsam och attityduppskattningen är inte tillförlitlig. På grund av den slutna arkitekturen hos de flesta GPS-moduler är den mest populära typen av fusionsmetod en så kallad okopplad eller löst kopplad hjälpmetod. INS med GPS används i fordonssäkerhetssystem för uppskattning av fordonets sidoförskjutning. Standardanvändningen omfattar styrning och navigering av fordon. GPS-signalen kräver att satelliterna är tydligt synliga, vilket ofta inte är möjligt i raviner, särskilt i urbana raviner. GPS/INS-systemen används ofta för navigering av en quadrokopter eller missilstyrning.

Figur 9.
För jämförelse av utgångsdata under stabilitetstestet från gyroskopens Y-axel för de testade sensorerna (MTiG-28, Crista IMU och vår sensor). Varje värde i diagrammet är ett medelvärde av 5 prover från sensorn.
Vi har utvecklat ett tröghetsnavigeringssystem som en komplett navigationslösning inbäddad i ett enda PCB. Det innehåller 10-DOF tröghetsmätningsenhet som presenteras ovan tillsammans med en GPS-modul (Global Positioning System). För att kompensera för den låga precisionen i höjdskattningen från GPS:en har ytterligare en barometer inbäddats. Med den beskrivna inertialenheten kan man mäta vinklar i tre dimensioner, accelerationer också i tre dimensioner, riktningen för den starkaste magnetsignalen och temperaturen i omgivningen. Den använder MEMS-teknik för att minska både storlek och vikt på sensorn. INS-kretskortet med MCX-kontakt väger 3,67 gram utan montering och 8,86 gram med standardmontering.
Mätdata från sensorn kan beroende på version skickas via USB- eller CAN-buss som är typiska industristandarder för dataöverföring. Flexibiliteten krävs av moderna sensorer för att de ska kunna integreras i befintliga system. Av samma anledning har sensorn en flexibel konfiguration av utgångsdata. Sensorns utgångsdata kan erhållas i tre versioner: som råa sensordata, som data efter kalibrering och temperaturkompensation eller som utgång från bearbetningsfilter. Data från sensorerna kan också levereras i olika former till användaren. Den första formen är rotationsmatrisen, som genereras på grundval av data från anordningen. Data kan också levereras till slutanvändaren i form av Eulervinklar och deras värden i grader eller radianer. Den tredje typen av representation av utgångsdata är genom användning av kvaternioner. De utgående positionskoordinaterna från GPS sänds i koordinatsystemet ECEF (Earth Centered Earth Fixed). Enheten för den uppskattade hastigheten från GPS är m/s.Den använda inbyggda atmosfäriska tryckhöjdmätaren kännetecknas av intern temperaturkompensation. Den gör det möjligt att mäta det atmosfäriska trycket i intervallet 20-110 kPa med en upplösning på 1,5 Pa. Den kan användas för att uppskatta sensorns höjd med en upplösning på 30 cm. Sensorns geografiska lokalisering beräknas med hjälp av GPS-modulen. GPS:en är ansluten till mikroprocessorn via en seriell kommunikationsbuss. För att förbättra kvaliteten på koordinatuppskattningen är det möjligt att överföra differentiella korrigeringar (DGPS) till GPS. Utgången från GPS är i koordinatsystemet ECEF (Earth Centered Earth Fixed) och frekvensen är 10 Hz.
Den presenterade INS-sensorns volym är mindre än 4 cm3 med hölje och väger 8,86 . En sådan storlek på sensorn kan göra det möjligt för konstruktörer av robotar att gå från enheter av betydande storlek till konstruktioner i mikroskala. Maximal acceleration som sensorn kan motstå är 500 , medan ingångsspänningen är från 3,5 till 8 V och strömförbrukningen är 50 mA. Det finns två olika typer av hölje som gör det möjligt att fästa sensorn på olika ställen. Den minsta Micro-versionen (fig. 10) storlek med montering är 32,7 x 14,9 x 8,0 . Version med MCX-kontakt (fig. 3b) är 32,7 x 14,9 x 12,1 . Volymen för den förlängda versionen är mindre än 6 cm3 . Sensorn kan fungera i ett brett temperaturintervall från -40°C till 80°C.
Fysiska mätningar för alla versioner presenteras i tab.5..

Figur 10.
Framsidan (a) och baksidan (b) av det tröghetsnavigeringssystemets kretskort med MCX-kontakt.
| INS typ | Dim. X | Dim. Y | Dim. Z | Enheter | Volym |
| Mikroversion | 32.7 | 14.9 | 8.0 | mm | 3.897 cm3 |
| Extended version | 32.7 | 14.9 | 12.1 | mm | 5.895 cm3 |
| Gemensamma parametrar | Min. | Typ | Max. | Enheter | |
| Vikt (utan hölje) | – | 3.67 | – | gram | |
| Vikt (med hölje) | – | 8.86 | – | gram | |
| Arbetstemperatur | -40 | – | 80 | °C | |
| Lagringstemperatur | -60 | – | 100 | °C | |
| Maximal acceleration | – | 500 | – | g | |
| Inputspänning | 3.5 | 5.0 | 6.0 | V | |
| Ström | 40 | 50 | 60 | mA | |
Tabell 5.
Fysikaliska egenskaper hos sensorn.
Kalibrerade axelriktningar är ingraverade och färgade på ovansidan enligt fig. 11.

Figur 11.
Insemons monteringsschema. a) Micro-Mounting version, b) Extended version.
Den introducerade INS jämfördes mot den minsta IMU med en volym under 2 . Både mät- och storleksaxlarna är markerade i fig 12ab. X-måttet för mikro-IMU 5 är 18,6 vilket är ungefär 57 % av INS-storleken. Y-måttet är 14,7, vilket är ungefär 99 % av INS-storleken, och IMU:ns Z-mått är mer eller mindre lika med 91 % av mikroversionen av INS och 60 % av den utökade versionen. Den utvidgade LEMO-versionen av IMU:n är dock 18, vilket är 225 % av mikroversionen av INS:en. En jämförelse baserad på volymen gör det endast möjligt att konstatera att mikroversionen av INS är mindre än två gånger större (195 % av mikroversionen av IMU).

Figur 12.
Figur 12: Jämförelse mellan det föreslagna INS (b) och världens minsta IMU (a). Mätaxlarna är inritade i bilden. c) Jämförelse av monteringsstorleken för det föreslagna INS och IMU:n. d) Jämförelse av de yttre egenskaperna hos det föreslagna INS och IMU:n.