Innehållsförteckning
Inledning
Fordriftsdynamiken är en integrerad del av ett bilfordon som är lika viktig som drivlinan i ett fordon, Om vi behöver en drivlina för att driva ett fordon behöver vi också fordonsdynamiska system för att hålla fordonet stabilt, Som vi vet är fjädringssystemet den del av fordonsdynamiken som ger fordonet ytkontakt tillsammans med vridstabilitet, men låt oss bara tänka, vändning av fordonets riktning medan det rör sig inbjuder många krafter som stör fordonets stabilitet, vilket ger upphov till många frågor som: Hur görs det?. Vilka är kraven för att styra fordonet i önskad riktning? För att hitta dessa svar ska vi studera vidare.
Ett styrsystem i en bil är en integrerad del av fordonsdynamiken i ett fordon där en rad mekaniska komponenter med vissa viktiga vinklar samlas för att styra fordonets framhjul i enlighet med de uppgifter som passageraren ger via ratten.
Och servostyrningssystemet är ett avancerat styrsystem där den ansträngning som krävs för att styra fordonets framhjul från sida till sida minskas med hjälp av mellanliggande elektriska eller hydrauliska anordningar som multiplicerar den kraft som föraren applicerar via ratten för att uppnå en jämn och snabb riktningsändring av fordonet.
I dag är alla 80 % av bilarna på vägarna utrustade med servostyrning som har blivit ett grundläggande behov i dagens bil.
När servostyrningen infördes 1903 konstaterades att antalet olyckor på vägen minskade till den märkbara gränsen, vilket i sin tur gör den till ett måste i en fyrhjulsdriven bil.
Varför behöver vi servostyrning?
Som vi redan har diskuterat ovan minskar en servostyrning styransträngningarna, vilket är behovet av ett fyrhjuligt bilfordon, så vi behöver en servostyrning på grund av följande skäl
- Snabbt gensvar- Eftersom antalet fordon på vägen ökar dag för dag och i dag har nästan 60 % av världens familjer en fyrhjulig bil i sina hus, Med denna ökning av antalet fordon ökar också risken för olyckor på vägen, så för att undvika denna fara och för att kunna ta de snabba svängar som vägförhållandena kräver krävs ett styrsystem med snabb respons i ett fyrhjuligt fordon.
- Styrning – Om vi kör gamla bilar, t.ex. Maruti Suzuki 800, upptäcker man att bilens ratt känns mycket svår att vrida när fordonet går under 40 km/tim (däröver känns styrningen mindre hård), vilket leder till att föraren blir trött när han eller hon åker på en lång resa. Ett fordon bör därför utrustas med en servostyrning så att den styrkraft som krävs för att styra framhjulen kan minskas.
- Stötstyrning – Som vi vet reduceras vägens stötar av fjädringssystemet, men eftersom styrsystemet är direkt kopplat till hjulnavet överförs en del av stötarna till styrsystemet som i sin tur försöker styra fordonet mot förarens vilja, vilket kan leda till att fordonet förlorar sin stabilitet, Även om stötstyrningen kan kontrolleras mekaniskt genom att ge optimal skrubberadie (vinkel mellan hjulets mittlinje och axelns lutning i knogarna), så kontrolleras den effektivare med hjälp av servostyrningen.
- Återvändningsförmåga – efter en sväng visar det sig att styrningen automatiskt återgår till sitt ursprungliga läge, vilket i sin tur automatiskt rätar upp det rörliga fordonet. Ett fordon som är utrustat med en servostyrning ger bättre returförmåga till styrsystemet.
Läs också:
Hur fungerar en motor med fri kolv?
Typer av växellådor – fullständig förklaring
Hur fungerar ett låsningsfritt bromssystem (ABS)?
Typer av servostyrningssystem
På grundval av den metod som används för att multiplicera styrkraften finns det tre typer av servostyrningssystem som är-
1. Hydraulisk servostyrning- Det är den typ av servostyrning där ett hydrauliskt system med en hydraulpump som drivs av motorn och hydrauliska cylindrar används för att multiplicera styrhjulets inmatningskraft, vilket i sin tur minskar de ansträngningar som krävs för att styra fordonets framhjul.
- En högkomprimerad hydraulisk vätska används inne i den hydrauliska cylindern som utövar tryck på styrhjulet.
2. Elektrohydraulisk servostyrning- Det är en modifierad version av hydraulsystemet där den roterande hydraulpumpen som drivs av motorn i den hydrauliska servostyrningen ersätts med en hydraulpump som drivs av elmotorn.
- Det kallas också hybridservostyrning på grund av att det används både hydrauliska och elektriska komponenter.
3. Elektronisk servostyrning- Det är den senaste typen av servostyrning där det hydrauliska systemet från den hydrauliska servostyrningen helt och hållet ersätts med elmotorer och elsensorer, i stället för att använda hydraulisk kraft ,används motorn som drivs av fordonets batteri för att applicera kraft på styrväxeln och det vridmoment som tillhandahålls av motorn styrs av sensorerna som registrerar styrkolonnens läge.
- Det här systemets styrsvar är snabbt och mycket effektivt varför det används i nästan alla nya bilar idag.
Viktiga komponenter
De viktiga delarna i ett servostyrningssystem är-
1. Styrmekanism- Vanligtvis används kuggstångsstyrning i servostyrning där rattens rotationsrörelse omvandlas till hjulens tvärgående rörelse genom en uppsättning ständigt maskade snäckor som kallas kuggstång som ger tvärgående rörelse och en kugghjul som ger rotationsrörelse.
2. Kopplingar – De är de mekaniska begränsningar som ger relativ rörelse mellan två komponenter, den typ av kopplingar som används i servostyrning är de kopplingsvägar som förbinder kuggstången med hjulets knoge för att överföra kuggstångens tvärgående rörelse till hjulen.
3. Kraftanordning – Som vi redan diskuterat ovan används en kraftmultipliceringsanordning (antingen hydraulisk eller hybrid eller elektrisk) för att multiplicera styrhjulets kraft i syfte att minska styransträngningarna. Denna anordning är fäst vid kugghjulsmekanismens pinjong.
4. Ratt- En rund ratt används i en cockpit (som manövreras av föraren) som ger den roterande styrinriktningen till de övriga styranordningarna för att styra fordonet.
Servostyrningssystemets funktion
Servostyrningssystemets funktion skiljer sig åt beroende på de olika kraftmultiplikatorer som används, så för att förstå hur servostyrningen fungerar måste alla tre metoderna diskuteras separat.
1. Hydraulisk servostyrning
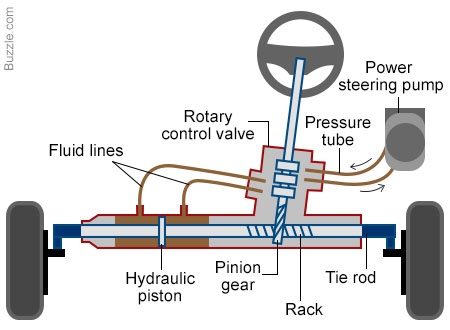
Bildkälla
I denna typ av servostyrning som vi diskuterat ovan används den hydrauliska kraften för att multiplicera styrningens ingångskraft för att jämna ut styrningen av framhjulen, denna hydrauliska kraft genereras av en serie komponenter som omfattar hydraulcylinder, rotatorhydraulisk pump, hydrauliska ledningar, högkomprimerad hydraulisk vätska och en kopplingsmekanism som kan koppla ihop detta hydrauliska system med styrsystemets kuggstång.
- När föraren ger input genom att vrida ratten börjar hydraulpumpen som drivs av motorn att pumpa den högkomprimerade hydraulvätskan genom ledningar.
- Det hydrauliska tryck som produceras av pumpen går in i hydraulcylindern som i sin tur utövar ett tryck över cylinderns kolv.
- Den kolv som står under högt tryck börjar röra sig från den ena änden till den andra, vilket i sin tur pressar ytterligare vätska genom ledningarna, med denna rörelse av kolven multipliceras den ingående kraft som föraren tillämpar flera gånger.
- Denna högtrycksvätska som skickas från hydraulcylindern applicerar sedan trycket på den bifogade kugghjulet genom kopplingsmekanismen som i sin tur applicerar hög kraft på kugghjulet och styrningen av framhjulen äger rum.
Läs också:
Vad är CVT – Kontinuerligt variabel växellåda och hur fungerar den?
Centrifugal kompressor – arbetsprincip, huvuddelar, fördelar, nackdelar med tillämpning
Hur fungerar momentomvandlare?
2. Hybrid- eller halvhydraulisk servostyrning
I denna typ av servostyrning ersätts den hydrauliska pumpen som drivs av motorn från den hydrauliska servostyrningen med en elektrisk pump vilket gör den mer tillförlitlig, detta är den enda modifiering som gjorts i övrigt fungerar detta system på samma sätt som den hydrauliska servostyrningen som nämns ovan.
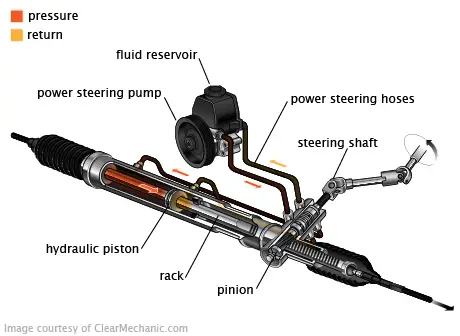
Bildkälla
3. Elektrisk servostyrning
Detta system är det senaste av alla de styrsystem som nämns ovan i denna typ av styrsystem som vi redan har diskuterat är kraftmultiplikationen elmotorns funktion i stället för hydraulvätskans funktion, och detta system fungerar på följande sätt.
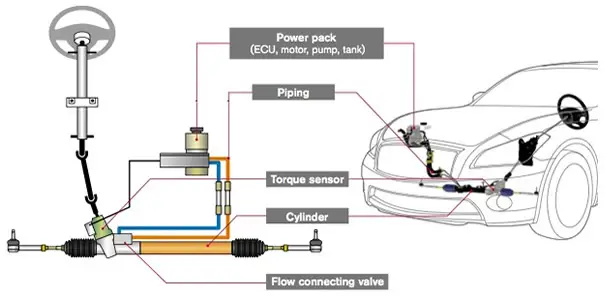
Bildkälla
- När föraren ger intryck via ratten läser de elektroniska sensorerna som är fästa vid rattstången av intrycket och skickar det till fordonets elektriska styrenhet.
- Fordonets ECU analyserar dessa ingångar och skickar spänningssignalen till elmotorn som är placerad i slutet av rattstången och vars kugghjul står i konstant kontakt med kugghjulet.
- På grund av dessa spänningssignaler som skickas av ECU:n startar motorn, som drivs av fordonets batteri, och ger det särskilda vridmomentet i enlighet med värdet på de mottagna spänningssignalerna
- När motorn startar börjar kugghjulet, som står i konstant kontakt med kugghjulet, överföra det multiplicerade vridmomentet till kugghjulet, som i sin tur applicerar detta vridmoment på kugghjulet, via vilket det är fäst.
- Med detta vridmoment som appliceras av kugghjulet på kugghjulet rör sig kugghjulet som i sin tur styr framhjulen (med hjälp av de fästade dragstängerna) enligt kraven.
För att få en bättre förståelse för olika typer av servostyrningssystem titta på videon nedan:
.