Miniaturizzazione dei sensori
La necessità di una crescente miniaturizzazione dei dispositivi elettronici al fine di utilizzarli in strumenti di uso quotidiano, robot in miniatura e UAV è prevista per alcuni anni prima di saltare ulteriormente dai dispositivi micro alle nano dimensioni. Pertanto, le unità di misura inerziali attualmente disponibili sul mercato hanno bisogno di una revisione. Ci sono più unità di misura inerziali commerciali disponibili sul mercato. Per esempio 3DM-GX 1 di MicroStrain, MTi-G di Xsens Technologies, Crista IMU di Cloud Cap Technology, μNAV di Crossbow Technology, AHRS200AV2.5 di Rotomotion e ADIS 16400/405 di Analog Devices. Al fine di verificare le capacità delle soluzioni citate abbiamo confrontato le sue caratteristiche con l’attuale stato dell’arte delle MEMS IMU 5 in miniatura sviluppate dagli autori del testo. Il confronto è visibile nella scheda. 1.
L’attuale stato dell’arte dell’IMU 5 10-DOF permette di misurare angoli in tre dimensioni, accelerazioni anche in tre dimensioni, direzione del segnale magnetico più forte e la temperatura dell’ambiente circostante. Utilizza la tecnologia MEMS per ridurre sia le dimensioni che il peso del sensore. Il sensore pesa solo 1,13 senza montaggio e 3,13 con il montaggio standard.
I dati di misurazione dal sensore IMU 5 a seconda della versione possono essere inviati attraverso il bus USB o CAN o RS-232 che sono tipici standard industriali di trasferimento dati. La flessibilità è richiesta dai sensori moderni per poterli integrare in un sistema esistente. Per lo stesso motivo il sensore ha una configurazione flessibile dei dati di uscita. L’uscita del sensore può essere acquisita in tre versioni: come dati grezzi del sensore, come dati dopo la calibrazione e la compensazione della temperatura, o come uscita del filtro di elaborazione. I dati dai sensori, possono anche essere consegnati in varie forme all’utente. La prima forma è la matrice di rotazione, che viene generata sulla base dei dati del dispositivo. I dati possono anche essere forniti all’utente finale sotto forma di angoli di Eulero e i loro valori dati in gradi o in radianti. Il terzo tipo di rappresentazione dei dati in uscita è l’uso dei quaternioni.
Lo schema del funzionamento della micro unità di misura è presentato in fig. 3 e le caratteristiche interne in tab. 2.
Uno dei sensori inerziali fondamentali è il giroscopio che misura la velocità angolare Ω (nello schema GYRO(X), GYRO(Y), GYRO(Z)). Questi sensori sono stati orientati in modo tale che i loro assi di misurazione creano un sistema di coordinate cartesiane destrorse. L’uscita dei segnali analogici di tipo MEMS è filtrata da un filtro passa-basso configurabile (12,5, 25, 50, 110 Hz). Dopo il filtraggio, il segnale viene convertito in forma digitale da un convertitore analogico-digitale con una risoluzione di 16 bit. Il segnale digitale può essere ulteriormente filtrato da filtri passa-basso e passa-alto configurabili. La frequenza dei dati provenienti dai giroscopi può essere impostata a 100, 200, 400 o 800 Hz. La risoluzione delle misure può essere configurata con una precisione modificata nella gamma da 250 °/s a 2000 °/s.
Un altro elemento importante nello schema è il blocco di sensori di accelerazioni lineari (nello schema ACC(X), ACC(Y), ACC(Z)). I sensori sono stati orientati in modo tale che gli assi di misurazione creano anche un sistema di coordinate cartesiane destrorse. I segnali analogici dall’uscita MEMS dei sensori sono stati reindirizzati al filtro e poi al convertitore analogico-digitale. La risoluzione massima delle accelerazioni misurate può essere configurata a ±2/±4/±8 (g ≇9.81m/s2). La sensibilità degli accelerometri è stata misurata come 1 .
| Produttore | MicroStrain | Xsens Technologies | Cloud Cap Technology |
| Modello | 3DM-GX1 | MTi-G | Crista IMU |
| Sensori interni | accelerometri, giroscopi, magnetometri, sensore di temperatura | accelerometri, magnetometri, giroscopi, GPS | accelerometri, giroscopi, sensore di temperatura |
| Giroscopi gamma | ± 300°/sec | ± 300°/sec | ± 300°/sec |
| Gamma degli accelerometri | ± 5 g | ± 5 g | ± 10 g |
| Uscita digitale | RS-232, RS-485 | RS-232, USB | RS-232, CAN |
| Gamma di temperatura | -40°C a +70°C | -20°C a +60°C | -40°C a +70°C |
| Dimensioni con montaggio | 64x90x25 | 58x58x33 | 52.07×38.8×25.04 |
| Peso | 75 | 68 | 38.6 |
| Produttore | Crossbow Technology | Dispositivi analogici | Rotomotion |
| Modello | μNAV | ADIS 16400/405 | AHRS200AV2.5 |
| Sensori interni | accelerometri, giroscopi, magnetometri, sensore temperatura, GPS | accelerometri, magnetometri, giroscopi, sensore temperatura | accelerometri, giroscopi, magnetometri |
| Giroscopi gamma | ± 150°/sec | ± 75-300°/sec | ± 90°/sec |
| Gamma degli accelerometri | ± 2 g | ± 18 g | ± 2 g |
| Uscita digitale | RS-232 | SPI | RS-232, Ethernet |
| Gamma di temperatura | -5°C a +45°C | -40°C a +85°C | -5°C a +75°C |
| Dimensioni con montaggio | 57x45x11 | 31.9×23.5×22.9 | “/>100x100x100 |
| Peso | 33 | 16 | “/>100 |
Tabella 1.
Confronto delle unità di misura inerziali miniaturizzate attualmente disponibili sul mercato.

Figura 3.
Lo schema di funzionamento delle IMU.
Il prossimo blocco funzionale misura il campo magnetico terrestre utilizzando dei magnetometri (nello schema MAG(X), MAG(Y), MAG(Z)). Gli assi di misura dei sensori sono orientati in un sistema di coordinate cartesiane destrorse. L’uscita analogica dei sensori è collegata a un convertitore analogico-digitale e a un blocco di filtri configurabili. I valori massimi possibili da misurare sono nell’intervallo da 1,3 a 81. con risoluzione di 1/1055.
L’ultimo blocco funzionale contiene il termometro che misura la temperatura nell’ambiente dell’IMU al fine di consentire la compensazione della temperatura delle letture degli accelerometri, giroscopi e magnetometri.
Tutti i blocchi funzionali sono collegati con l’unità di elaborazione centrale indicata nello schema uProcessor. Al fine di memorizzare i parametri richiesti per gli algoritmi è stata aggiunta una memoria aggiuntiva (segnata nello schema come eeprom). La CPU esegue il filtraggio prima che i dati siano reindirizzati all’uscita CAN o USB o RS-232. Per stabilire i parametri dell’algoritmo di filtraggio è necessaria la fase di calibrazione.
| Sensori interni | accelerometri, giroscopi, magnetometri, sensore di temperatura | Giroscopi gamma | da ± 250 a 2000°/sec |
| Accelerometri gamma | da ± 2 a ± 8 g | uscita digitale | CAN, USB o RS-232 |
Tabella 2.
Caratteristiche interne dell’unità di misura inerziale presentata.
Il volume del sensore IMU presentato è inferiore a 2cm3 con custodia e pesa 3,13. Tale dimensione del sensore può permettere ai progettisti di robot di passare da dispositivi di dimensioni considerevoli ai progetti della micro scala. Il sensore di accelerazione massima è in grado di sopportare è 500, mentre la tensione di ingresso è da 3,5 a 8V, e il consumo di corrente è 35 mA. Ci sono tre diversi tipi di alloggiamento che permettono il fissaggio del sensore in vari luoghi. Il più piccolo versione Micro (fig. 4) dimensioni con montaggio è 18,6 x 14,7 x 7,3 . La versione con i fori di montaggio aggiuntivi versione Micro-Mounting (fig. 5a) è 18,6 x 20,7 x 7,3 . Le custodie della versione Micro e della versione Micro-Mounting sono dotate di un cavo di uscita con connettore USB o RS-TTL a seconda della versione. C’è anche una versione estesa con fori di montaggio e una spina LEMO incorporata nella custodia (fig. 5b). Le sue dimensioni sono 32.0 x 18.0 x 16.5.
Le misure fisiche di tutte le versioni sono presentate nella Tab.3.

Figura 4.
Il lato anteriore e posteriore dell’unità di misura inerziale.
Gli orientamenti degli assi calibrati sono incisi e colorati sul lato superiore come presentato in Fig. 5. La dimensione del singolo montaggio è di 6,15 mm per la versione Micro-Mounting, e 6,50 mm per la versione Extended LEMO.
Prima dell’applicazione dell’IMU negli oggetti fisici è stato fatto un confronto tra i più piccoli sensori disponibili sul mercato per verificare la possibilità di navigazione di veicoli mobili autonomi. Gli studi comparativi sono stati progettati per controllare i parametri impostati sul prototipo, analizzare le cause degli errori di misurazione e verificare come si comportano i sensori che hanno eseguito i test in situazioni estreme. Per i test sono stati utilizzati due popolari sensori miniaturizzati commerciali: MTiG-28G di XSens Technologies e Crista IMU di Microstrain (fig. 6b).
| tipo IMU | Dim. X | Unità | Volume | |||
| Versione micro | 18.6 | 14.7 | 7.3 | mm | 1.996 cm3 | |
| Versione micro | Micro | 18.6 | 20.7 | 7.3 | mm | 2.811 cm3 |
| Versione estesa | 32.0 | 16.5 | 18.0 | mm | 9.504 cm3 | |
| Parametri comuni | Min. | Tipo | Max. | Unità | ||
| Peso (senza alloggiamento) | – | 1.13 | – | grammo | ||
| Peso (con alloggiamento) | – | 3.13 | – | grammo | ||
| Temperatura di funzionamento | -40 | – | 80 | °C | ||
| Temperatura di stoccaggio | -60 | – | 100 | °C | ||
| Accelerazione massima | – | 500 | – | g | ||
| Tensione in ingresso | 3.5 | 5.0 | 6.0 | V | ||
| Corrente | 30 | 35 | 40 | mA | ||
Tabella 3.
Caratteristica fisica del sensore.

Figura 5.
Lo schema di montaggio della micro IMU. a) versione Micro-Mounting, b) versione Extended LEMO.

Figura 6.
A) Confronto delle dimensioni della IMU presentata con i prodotti disponibili sul mercato, b) Piattaforma di confronto IMU. L’IMU presentato è contrassegnato dall’ellisse rossa. Nella parte sinistra dell’immagine si può vedere Crista IMU. Dall’altro lato si può vedere la MtiG Imu di XSense Technologies.
Al fine di eseguire studi comparativi è stata progettata, prodotta e utilizzata una piattaforma di calibrazione (fig. 6b). Tutte le IMU testate sono state montate sulla piattaforma e i loro dati grezzi sono stati calibrati al sistema di coordinate comune per tutti i sensori utilizzando il metodo di calibrazione presentato. Sono stati eseguiti diversi test: il confronto dei dati grezzi, il confronto dei dati filtrati, la stabilità temporale dei sensori e la capacità di compensazione della temperatura. Nella fig. 7a è presentato il confronto delle letture dagli accelerometri del sensore IMU presentato (CZK nel grafico) e del sensore MTiG (MTI nel grafico) e nella fig. 7b è presentato il confronto dei giroscopi. Entrambi i confronti sono stati registrati durante il movimento.
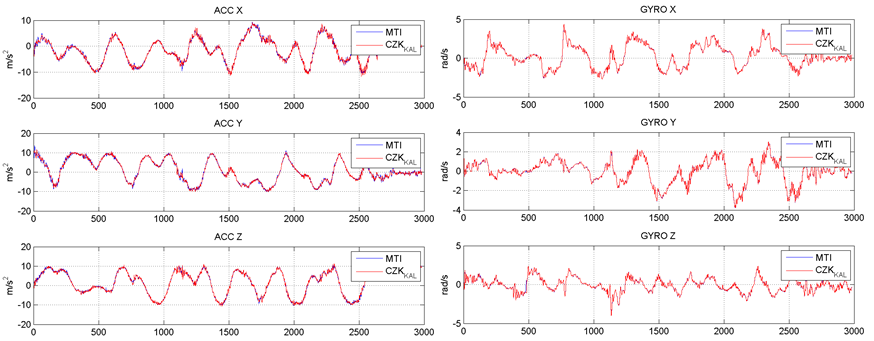
Figura 7.
Un esempio di grafico dagli studi comparativi del sensore IMU presentato e dei sensori disponibili sul mercato. Il sensore IMU presentato è etichettato come CZK e il sensore MTiG di XSens Technologies è etichettato come MTI. Le unità di tempo sono: a) le letture degli accelerometri, b) le letture dei giroscopi.
Si può notare che i dati di uscita del sensore calibrato presentato e del sensore di riferimento sono quasi gli stessi. Per misurare le differenze abbiamo stimato il segnale dai dati grezzi e lo abbiamo separato dalla componente di rumore. Solo l’asse di misurazione Y del giroscopio è stato scelto come esempio per la presentazione. La scelta è stata possibile perché i risultati ottenuti sono comparabili indipendentemente dall’asse e dal sensore (magnetometri, accelerometri o giroscopi). Nella parte destra della fig. 8 è presentato che la deviazione standard del rumore per MTi-G28 e il nostro sensore è circa 0,04 mentre il risultato di Crista IMU è circa 0,12. La differenza tra la deviazione standard di MTi-G28 e il nostro sensore è solo 0,0035 che di solito è indistinguibile dall’occhio umano.
L’ulteriore tabella di confronto del coefficiente di segnale/rumore è presentata nella tab. 4.
Un problema importante per le unità di misura inerziali è la stabilità temporale dei dati di uscita. Abbiamo eseguito una serie di test di stabilità con una durata di 4 ore. I risultati presentati nella fig. 9 sono stati acquisiti dopo la media di cinque campioni di ogni IMU nel test. Si possono fare due osservazioni principali. In primo luogo, i risultati di MTi-G28 e della nostra IMU sono comparabili. La differenza dei valori medi ottenuti è solo 0,00027 e la differenza tra i valori di deviazione standard è 0,00226 che è ancora più bassa rispetto al test con il movimento. La seconda osservazione è che i risultati del nostro sensore e di MTi-G28 sono più di 20 volte più vicini al valore reale 0.

Figura 8.
Il confronto dei dati di uscita durante il movimento dall’asse Y dei giroscopi per i sensori testati (MTiG-28, Crista IMU e il nostro sensore). Le unità di tempo sono .
| Crista IMU (S/NKAL) | MTiG (S/NKAL) | IMU 5 (S/NKAL) | |
| Accelerometri | 20,3 | 38,1 | 43,2 |
| Magnetometri | N/A | 719,3 | 767,9 |
| Giroscopi | 13,6 | 206,7 | 254,5 |
Tabella 4.
Il confronto del coefficiente segnale-rumore per le IMU testate. (Più grande è il valore, meglio è).
La disponibilità globale del GPS, l’affidabilità relativamente alta delle letture e nessun bisogno di infrastrutture aggiuntive sono le ragioni principali per cui la maggior parte dei moderni sistemi di navigazione inerziale usano il GPS. L’INS tipicamente può essere caratterizzato da una velocità di aggiornamento veloce e da un errore piccolo ma non limitato. L’errore del GPS è limitato, ma il tempo di aggiornamento è lento e la stima dell’assetto non è affidabile. A causa dell’architettura chiusa della maggior parte dei moduli GPS, il tipo più popolare di metodi di fusione è chiamato aiuto disaccoppiato o vagamente accoppiato. L’INS con il GPS è usato nei sistemi di sicurezza dei veicoli per la stima di un sideslip del veicolo. L’uso standard riguarda la guida e la navigazione del veicolo. Il segnale GPS richiede una chiara visibilità dei satelliti che spesso non è possibile nei canyon, specialmente negli ambienti urbani. I sistemi GPS/INS sono spesso utilizzati per la navigazione di un quadrocopter o la guida di un missile.

Figura 9.
Il confronto dei dati di uscita durante il test di stabilità dall’asse Y dei giroscopi per i sensori testati (MTiG-28, Crista IMU e il nostro sensore). Ogni valore nel grafico è un valore medio di 5 campioni dal sensore.
Abbiamo sviluppato un sistema di navigazione inerziale come soluzione completa di navigazione incorporata in un singolo PCB. Esso contiene l’unità di misurazione inerziale 10-DOF presentata sopra accompagnata dal modulo Global Positioning System (GPS). Per compensare la bassa precisione della stima dell’altitudine del GPS è stato incorporato un barometro aggiuntivo. L’INS descritto permette di misurare gli angoli in tre dimensioni, le accelerazioni anche in tre dimensioni, la direzione del segnale magnetico più forte e la temperatura dell’ambiente circostante. Utilizza la tecnologia MEMS per ridurre sia le dimensioni che il peso del sensore. Il circuito stampato INS con connettore MCX pesa 3,67 grammi senza montaggio e 8,86 grammi con il montaggio standard.
I dati di misurazione del sensore a seconda della versione possono essere inviati attraverso il bus USB o CAN, che sono i tipici standard industriali di trasferimento dati. La flessibilità è richiesta dai sensori moderni per poterli integrare in un sistema esistente. Per lo stesso motivo il sensore ha una configurazione flessibile dei dati di uscita. L’uscita del sensore può essere acquisita in tre versioni: come dati grezzi del sensore, come dati dopo la calibrazione e la compensazione della temperatura, o come uscita del filtro di elaborazione. I dati dai sensori, possono anche essere consegnati in varie forme all’utente. La prima forma è la matrice di rotazione, che viene generata sulla base dei dati del dispositivo. I dati possono anche essere forniti all’utente finale sotto forma di angoli di Eulero e i loro valori dati in gradi o in radianti. Il terzo tipo di rappresentazione dei dati in uscita è usando i quaternioni. Le coordinate di posizione in uscita dal GPS sono inviate nel sistema di coordinate Earth Centered Earth Fixed (ECEF). L’unità della velocità stimata dal GPS è m/s. L’altimetro a pressione atmosferica incorporato utilizzato è caratterizzato dalla compensazione interna della temperatura. Permette di misurare la pressione atmosferica nell’intervallo da 20 a 110 kPa con una risoluzione di 1,5 Pa. Può essere utilizzato per stimare l’altitudine del sensore con una risoluzione pari a 30cm. La localizzazione geografica del sensore è calcolata utilizzando il modulo GPS. Il GPS è collegato al microprocessore tramite un bus di comunicazione seriale. Per migliorare la qualità della stima delle coordinate è possibile passare alle correzioni differenziali del GPS (DGPS). L’uscita dal GPS è in sistema di coordinate ECEF (Earth Centered Earth Fixed) e la frequenza è di 10 Hz.
Il volume del sensore INS presentato è inferiore a 4cm3 con custodia e pesa 8,86 . Tale dimensione del sensore può consentire ai progettisti di robot di passare da dispositivi di dimensioni considerevoli ai disegni della scala micro. Il sensore di accelerazione massima è in grado di resistere è 500 , mentre la tensione di ingresso è da 3,5 a 8V, e il consumo di corrente è 50 mA. Ci sono due diversi tipi di alloggiamento che permettono il fissaggio del sensore in vari luoghi. La più piccola versione Micro (fig. 10) con montaggio è di 32,7 x 14,9 x 8,0 . La versione con il connettore MCX (fig. 3b) è 32,7 x 14,9 x 12,1 . Il volume della versione estesa è inferiore a 6cm3. Il sensore può funzionare in una vasta gamma di temperature da -40°C a 80°C.
Le misure fisiche di tutte le versioni sono presentate nella Tab.5.

Figura 10.
La parte anteriore (a) e posteriore (b) del PCB del sistema di navigazione inerziale con connettore MCX.
| Tipo INS | Dim. X | Unità | Volume | ||
| Versione micro | 32.7 | 14.9 | 8.0 | 3,897 cm3 | |
| Versione estesa | 32,7 | 14.9 | 12.1 | mm | 5.895 cm3 |
| Parametri comuni | Min. | Tipo | Max. | Unità | |
| Peso (senza custodia) | – | 3.67 | – | grammo | |
| Peso (con custodia) | – | 8.86 | – | grammo | |
| Temperatura di funzionamento | -40 | – | 80 | °C | |
| Temperatura di stoccaggio | -60 | – | 100 | °C | |
| Accelerazione massima | – | 500 | – | g | |
| Tensione in ingresso | 3.5 | 5.0 | 6.0 | V | |
| Corrente | 40 | 50 | 60 | mA | |
Tabella 5.
Caratteristiche fisiche del sensore.
Gli orientamenti degli assi calibrati sono incisi e colorati sul lato superiore come presentato in Fig. 11.

Figura 11.
Lo schema di montaggio INS. a) versione Micro-Mounting, b) versione estesa.
L’INS introdotto è stato confrontato con il più piccolo IMU con un volume inferiore a 2 . Entrambi gli assi di misura e dimensione sono segnati nella fig 12ab. La dimensione X della micro IMU 5 è 18,6 che è circa il 57% della dimensione dell’INS. La dimensione Y è 14,7 che è circa il 99% della dimensione INS e la dimensione Z dell’IMU è più o meno uguale al 91% della versione Micro dell’INS e al 60% della versione Extended. Tuttavia la versione LEMO estesa dell’IMU è 18 che è il 225% della versione micro dell’INS. Il confronto basato sul volume permette solo di affermare che la versione micro dell’INS è meno di due volte più grande (195% della versione micro dell’IMU).

Figura 12.
Il confronto dell’INS proposto (b) con la più piccola IMU del mondo (a). Gli assi di misura sono disegnati nell’immagine. c) Il confronto delle dimensioni di montaggio dell’INS presentato e dell’IMU, d) Il confronto delle caratteristiche esterne dell’INS proposto e dell’IMU.