Az érzékelők miniatürizálása
Az elektronikus eszközök növekvő miniatürizálásának igénye a mindennapi eszközökben, miniatűr robotokban és UAV-kben való felhasználásuk érdekében előreláthatólag néhány évig meg fog állni, mielőtt a mikro- és nanoméretű eszközökről tovább ugranánk. Ezért a piacon jelenleg kapható inerciális mérőegységek felülvizsgálatra szorulnak. A piacon több kereskedelmi forgalomban kapható inerciális mérőegység is van. Ilyen például a 3DM-GX 1 a MicroStrain-től, az MTi-G az Xsens Technologies-tól, a Crista IMU a Cloud Cap Technology-tól, a μNAV a Crossbow Technology-tól, az AHRS200AV2.5 a Rotomotion-tól és az ADIS 16400/405 az Analog Devices-től. Az említett megoldások képességeinek ellenőrzése érdekében összehasonlítottuk jellemzőit a szöveg szerzői által kifejlesztett, a technika jelenlegi állása szerinti miniatűr MEMS IMU 5 jellemzőivel. Az összehasonlítás a lapon látható. 1.
A jelenlegi technika jelenlegi állása szerinti IMU 5 10-DOF lehetővé teszi a szögek mérését három dimenzióban, a gyorsulások mérését szintén három dimenzióban, a legerősebb mágneses jel irányát és a környezet hőmérsékletét. Az érzékelő méretének és súlyának csökkentése érdekében MEMS technológiát alkalmaz. Az érzékelő súlya mindössze 1,13 a rögzítés nélkül és 3,13 a szabványos rögzítéssel.
Az IMU 5 érzékelőtől származó mérési adatok a verziótól függően USB vagy CAN buszon vagy RS-232-n keresztül küldhetők, amelyek az adatátvitel tipikus ipari szabványai. A modern érzékelőktől megkövetelt rugalmasság a meglévő rendszerekbe való integráláshoz szükséges. Ugyanezen okból kifolyólag az érzékelő rugalmas kimeneti adatkonfigurációval rendelkezik. Az érzékelő kimenete három változatban vehető fel: nyers érzékelőadatként, kalibrálás és hőmérséklet-kompenzáció utáni adatként vagy feldolgozó szűrő kimeneteként. Az érzékelők adatai különböző formákban is eljuttathatók a felhasználóhoz. Az első forma a forgatási mátrix, amelyet az eszközből származó adatok alapján generálnak. Az adatok Euler-szögek és azok fokban vagy radiánban megadott értékei formájában is eljuttathatók a végfelhasználóhoz. A harmadik típusú kimeneti adatreprezentáció a kvaternionok felhasználásával történik.
A mikromérőegység működésének sémáját a 3. ábra, a belső jellemzőit pedig a fül mutatja be. 2.
Az egyik alapvető inerciális érzékelő az Ω szögsebességet mérő giroszkóp (sémában GYRO(X), GYRO(Y), GYRO(Z)). Ezeket a szenzorokat úgy tájolták, hogy mérőtengelyeik jobbkezes kartéziánus koordinátarendszert hozzanak létre. Az analóg MEMS típusú jelek kimenetét konfigurálható aluláteresztő szűrővel (12,5, 25, 50, 110 Hz) szűrik. A szűrés után a jelet 16 bites felbontású analóg-digitális átalakítóval alakítják át digitális formába. A digitális jelet konfigurálható alul- és felüláteresztő szűrőkkel tovább lehet szűrni. A giroszkópok adatainak frekvenciája 100, 200, 400 vagy 800 Hz-re állítható. A mérések felbontása 250 °/s és 2000 °/s közötti módosított pontossággal konfigurálható.
A séma másik fontos eleme a lineáris gyorsulásérzékelők blokkja (a sémában ACC(X), ACC(Y), ACC(Z)). A szenzorokat úgy tájoltuk, hogy a mérőtengelyek is jobbkezes kartéziánus koordinátarendszert alkossanak. A szenzorok MEMS kimenetéről származó analóg jeleket a szűrőre, majd az analóg-digitális átalakítóra irányítottuk. A mért gyorsulások maximális felbontása ±2/±4/±8 (g ≇9,81m/s2) értékre állítható be. A gyorsulásmérők érzékenységét 1 .
| Producer | MicroStrain | Xsens Technologies | Cloud Cap. Technology | |
| Model | 3DM-GX1 | MTi-G | Crista IMU | |
| Belső érzékelők | accelerométerek, giroszkópok, magnetométerek, hőmérsékletérzékelő | gyorsulásmérők, magnetométerek, giroszkópok, GPS | gyorsulásmérők, giroszkópok, hőmérsékletérzékelő | |
| Gyroszkópok tartománya | ± 300°/sec | ± 300°/sec | ± 300°/sec | ± 300°/sec |
| Akcelerométerek tartománya | ± 5 g | ± 5 g | ± 10 g | |
| Digitális kimenet | RS-232, RS-485 | RS-232, USB | RS-232, CAN | |
| Hőmérsékleti tartomány | -40°C-tól +70°C-ig | -20°C-tól +60°C-ig | -40°C-tól +70°C-ig | |
| Méret a rögzítéssel együtt | 64x90x25 | 58x58x33 | 52.07×38.8×25.04 | |
| Súly | 75 | 68 | 38.6 | |
| Gyártó | Crossbow Technology | Analogos eszközök | Rotomotion | |
| Modell | μNAV | ADIS 16400/405 | AHRS200AV2.5 | |
| Belső érzékelők | gyorsulásmérők, giroszkópok, magnetométerek, hőmérsékletérzékelő, GPS | gyorsulásmérők, magnetométerek, giroszkópok, hőmérsékletérzékelő | gyorsulásmérők, giroszkópok, magnetométerek | |
| Gyroszkópok tartománya | ± 150°/sec | ± 75-300°/sec | ± 90°/sec | |
| Akcelerométerek tartománya | ± 2 g | ± 18 g | ± 2 g | |
| Digitális kimenet | RS-232 | SPI | RS-232, Ethernet | |
| Hőmérsékleti tartomány | -5°C-tól +45°C-ig | -40°C-tól +85°C-ig | -5°C-tól +75°C-ig | |
| Méret a rögzítéssel együtt | 57x45x11 | 31.9×23.5×22.9 | “/>100x100x100 | |
| Súly | 33 | 16 | “/>100 |
1. táblázat.
A piacon jelenleg kapható miniatűr inerciális mérőegységek összehasonlítása.

3. ábra.
Az IMU működési sémája.
A következő funkcionális blokk a Föld mágneses terét méri magnetométerek segítségével (a sémában MAG(X), MAG(Y), MAG(Z)). A szenzorok mérési tengelyei a jobboldali kartéziánus koordinátarendszerben vannak tájolva. Az érzékelők analóg kimenete analóg-digitális átalakítóval, majd konfigurálható szűrőblokkal van összekötve. A maximálisan mérhető értékek 1,3 és 81 közötti tartományban vannak, 1/1055-ös felbontással.
Az utolsó funkcionális blokk hőmérőt tartalmaz, amely az IMU környezetének hőmérsékletét méri a gyorsulásmérők, giroszkópok és magnetométerek leolvasásainak hőmérséklet-kompenzálása érdekében.
A funkcionális blokkok mindegyike az uProcessor sémában jelölt központi feldolgozóegységhez kapcsolódik. Az algoritmusokhoz szükséges paraméterek tárolásához további memória került hozzáadásra (a sémában eepromként jelölve). A CPU elvégzi a szűrést, mielőtt az adatokat a CAN- vagy USB- vagy RS-232-kimenetre továbbítja. A szűrési algoritmus paramétereinek meghatározásához a kalibrációs fázisra van szükség.
| Belső érzékelők | gyorsulásmérők, giroszkópok, magnetométerek, hőmérsékletérzékelő | Gyroszkópok tartománya | ± 250 és 2000°/sec között |
| Akcelerométerek tartománya | ± 2 és ± 8 g között | Digitális kimenet | CAN, USB vagy RS-232 |
2. táblázat.
A bemutatott inerciális mérőegység belső jellemzői.
A bemutatott IMU érzékelő térfogata a házzal együtt 2 cm3 alatti és súlya 3,13. Az érzékelő ilyen mérete lehetővé teheti a robotok tervezői számára, hogy a jelentős méretű eszközökről a mikroméretű konstrukciók felé mozduljanak el. A maximális gyorsulás érzékelő képes ellenállni 500 , míg a bemeneti feszültség 3,5 és 8V között van, és az áramfelvétel 35 mA. Három különböző típusú ház létezik, amely lehetővé teszi az érzékelő különböző helyeken történő rögzítését. A legkisebb Micro változat (4. ábra) mérete a rögzítéssel együtt 18,6 x 14,7 x 7,3 . A további rögzítőfuratokkal ellátott Micro-Mounting változat (5a. ábra) mérete 18,6 x 20,7 x 7,3 . A Micro változat és a Micro-Mounting változat kimeneti kábele a változattól függően USB vagy RS-TTL csatlakozóval van ellátva. Létezik kiterjesztett változat is, a házba ágyazott rögzítőfuratokkal és LEMO dugóval (5b. ábra). Mérete 32,0 x 18,0 x 16,5 .
Az összes változat fizikai méretei a 3. táblázatban találhatók..

4. ábra.
A tehetetlenségi mérőegység elülső és hátsó oldala.
A kalibrált tengelyek orientációi az 5. ábrán bemutatott módon a felső oldalra vannak gravírozva és színezve. Az egyetlen rögzítés mérete 6,15 mm a Micro-Mounting változatnál és 6,50 mm a Extended LEMO változatnál.
Az IMU fizikai tárgyakban való alkalmazása előtt összehasonlítást végeztek a piacon elérhető legkisebb szenzorok között, hogy ellenőrizzék az autonóm mobil járművek navigálásának lehetőségét. Az összehasonlító vizsgálatokat úgy tervezték, hogy ellenőrizzék a prototípust felállított paramétereket, elemezzék a mérési hibák okait, és ellenőrizzék, hogy a teszteket elvégző érzékelők hogyan viselkednek szélsőséges helyzetekben. A vizsgálatokhoz két népszerű kereskedelmi miniatűr érzékelőt használtak: MTiG-28G az XSens Technologies-tól és Crista IMU a Microstrain-tól (6b. ábra).
| IMU típus | Dim. X | Dim. Y | Dim. Z | Egység | Volumen | |
| Mikro verzió | 18.6 | 14.7 | 7.3 | mm | 1,996 cm3 | |
| Mikro-szerelési változat | 18.6 | 20.7 | 7.3 | mm | 2,811 cm3 | |
| Extended változat | 32.0 | 16.5 | 18.0 | mm | 9,504 cm3 | |
| Közös paraméterek | Min. | Típus | Max. | Egység | ||
| Súly (ház nélkül) | – | 1.13 | – | gramm | ||
| Súly (házzal) | – | 3.13 | – | gramm | ||
| Működési hőmérséklet | -40 | – | 80 | °C | ||
| Tárolási hőmérséklet | – | -60 | – | 100 | °C | |
| Maximális gyorsulás | – | 500 | – | g | ||
| Bemeneti feszültség | 3.5 | 5.0 | 6.0 | V | ||
| Áram | 30 | 35 | 40 | mA | ||
3. táblázat.
Az érzékelő fizikai jellemzői.

5. ábra.
A mikro-IMU rögzítési séma. a) Micro-Mounting változat, b) Extended LEMO változat.

6. ábra
A) A bemutatott IMU méretének összehasonlítása a piacon elérhető termékekkel, b) IMU összehasonlító platform. A bemutatott IMU-t a piros ellipszis jelöli. A kép bal oldalán a Crista IMU látható. A másik oldalon az XSense Technologies MtiG Imu látható.
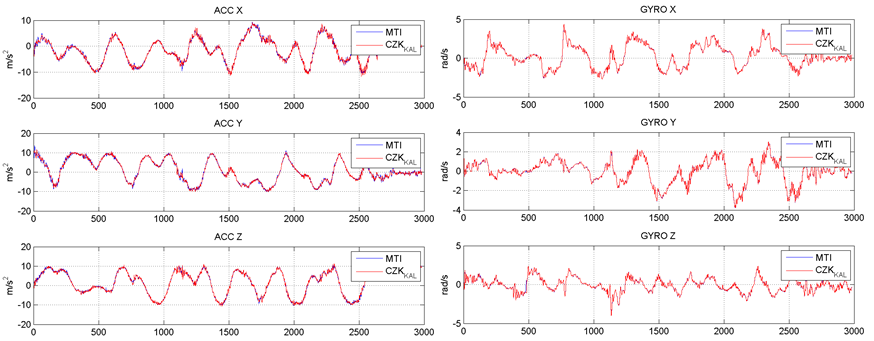
Az összehasonlító vizsgálatok elvégzéséhez kalibrációs platformot terveztek, gyártottak és használtak (6b. ábra). Az összes vizsgált IMU-t a platformra szerelték, és nyers adataikat a bemutatott kalibrációs módszerrel kalibrálták az összes érzékelő közös koordinátarendszerére. Számos vizsgálatot végeztek: a nyers adatok összehasonlítását, a szűrt adatok összehasonlítását, az érzékelők időbeli stabilitását és a hőmérséklet-kompenzáció képességét. A 7a. ábrán a bemutatott IMU-érzékelő (a grafikonon CZK) és az MTiG-érzékelő (a grafikonon MTI) gyorsulásmérőinek leolvasásainak összehasonlítása, a 7b. ábrán pedig a giroszkópok összehasonlítása látható. Mindkét összehasonlítást mozgás közben rögzítették.
7. ábra.
A bemutatott IMU szenzor és a piacon kapható szenzorok összehasonlító vizsgálataiból származó példadiagram. A bemutatott IMU-érzékelőt CZK-val, az XSens Technologies által gyártott MTiG-érzékelőt pedig MTI-vel jelöljük. Az időegységek . a) a gyorsulásmérők leolvasásai, b) a giroszkópok leolvasásai.
Látható, hogy a bemutatott kalibrált érzékelő és a referencia érzékelő kimeneti adatai szinte megegyeznek. A különbségek méréséhez a nyers adatokból becsültük a jelet, és elválasztottuk a zajkomponensektől. A bemutatáshoz csak a giroszkóp Y mérőtengelyét választottuk példának. A választás azért volt lehetséges, mert az elért eredmények a tengelytől és az érzékelőtől (magnetométer, gyorsulásmérő vagy giroszkóp) függetlenül összehasonlíthatóak. A 8. ábra jobb oldalán látható, hogy a zaj szórása az MTi-G28 és a mi érzékelőnk esetében körülbelül 0,04, míg a Crista IMU eredménye körülbelül 0,12. Az MTi-G28 és a mi érzékelőnk standard eltérése közötti különbség mindössze 0,0035, ami emberi szemmel általában megkülönböztethetetlen.
A jel/zaj együtthatót tartalmazó további táblázatos összehasonlítás a tab.
Az inerciális mérőegységek fontos problémája a kimeneti adatok időbeli stabilitása. Elvégeztünk egy 4 órás időtartamú stabilitási tesztsorozatot. A 9. ábrán bemutatott eredményeket a tesztben részt vevő minden egyes IMU öt mintájából vett átlagolás után kaptuk. Két fő megállapítás tehető. Először is, hogy az MTi-G28 és a mi IMU-ink eredményei összehasonlíthatóak. Az elért átlagértékek közötti különbség mindössze 0,00027, a szórásértékek közötti különbség pedig 0,00226, ami még alacsonyabb, mint a mozgással végzett teszt során. A második megfigyelés az, hogy az érzékelőnk és az MTi-G28 eredményei több mint 20-szor közelebb vannak a valós 0 értékhez.

8. ábra.
A giroszkópok Y tengelyéről történő mozgás közbeni kimeneti adatok összehasonlítása a vizsgált érzékelők (MTiG-28, Crista IMU és a mi érzékelőnk) esetében. Az időegységek a következők.
| Crista IMU (S/NKAL) | MTiG (S/ NKAL) | IMU 5 (S/NKAL) | |
| Accelerométerek | 20,3 | 38,1 | 43,2 |
| Magnetométerek | N/A | 719,3 | 767,9 |
| Gyroszkópok | 13,6 | 206,7 | 254,5 |
4. táblázat.
A vizsgált IMU-k jel-zaj együtthatójának összehasonlítása. (Minél nagyobb az érték, annál jobb).
A GPS globális elérhetősége, a leolvasások viszonylag nagy megbízhatósága és a kiegészítő infrastruktúra szükségtelensége a fő oka annak, hogy a legtöbb modern inerciális navigációs rendszer a GPS-t használja. Az INS jellemzően gyors frissítési sebességgel és kis, de nem kötött hibával jellemezhető. A GPS hibája korlátozott, azonban a frissítési idő lassú és a helyzetbecslés nem megbízható. A legtöbb GPS-modul zárt architektúrája miatt a legnépszerűbb fúziós módszertípus az úgynevezett független vagy lazán kapcsolt támogatás. A járműbiztonsági rendszerekben az INS-t GPS-szel együtt használják a jármű oldalcsúszásának becslésére. A szabványos felhasználás a járművezetést és a navigációt foglalja magában. A GPS-jelhez a műholdak tiszta láthatósága szükséges, ami gyakran nem lehetséges a kanyonokban, különösen városi kanyonkörnyezetben. A GPS/INS rendszereket gyakran használják a quadrocopter navigációjára vagy rakétairányításra.

9. ábra.
A stabilitási vizsgálat során a giroszkópok Y tengelyéből származó kimeneti adatok összehasonlítása a vizsgált szenzorok (MTiG-28, Crista IMU és a mi szenzorunk) esetében. A diagramon minden egyes érték a szenzor 5 mintájának átlagértéke.
Egy inerciális navigációs rendszert fejlesztettünk ki, mint egyetlen NYÁK-ba ágyazott teljes navigációs megoldást. Ez a fent bemutatott 10-DOF inerciális mérőegységet tartalmazza a globális helymeghatározó rendszer (GPS) moduljával együtt. A GPS alacsony pontosságú magasságbecslésének ellensúlyozására további barométert építettünk be. A leírt INS lehetővé teszi a szögek mérését három dimenzióban, a gyorsulások mérését szintén három dimenzióban, a legerősebb mágneses jel irányát és a környezet hőmérsékletét. Az érzékelő méretének és súlyának csökkentése érdekében MEMS-technológiát alkalmaz. Az MCX-csatlakozóval ellátott INS nyomtatott áramköri lap tömege 3,67 gramm szerelés nélkül és 8,86 gramm a szabványos szereléssel.
Az érzékelőből származó mérési adatok a verziótól függően az USB- vagy CAN-buszon keresztül küldhetők, amelyek az adatátvitel tipikus ipari szabványai. A modern érzékelőktől megkövetelt rugalmasság a meglévő rendszerekbe való integráláshoz szükséges. Ugyanezen okból kifolyólag az érzékelő rugalmas kimeneti adatkonfigurációval rendelkezik. Az érzékelő kimenete három változatban szerezhető be: nyers érzékelőadatként, kalibrálás és hőmérséklet-kompenzáció utáni adatként vagy feldolgozó szűrő kimeneteként. Az érzékelők adatai különböző formákban is eljuttathatók a felhasználóhoz. Az első forma a forgatási mátrix, amelyet az eszközből származó adatok alapján generálnak. Az adatok Euler-szögek és azok fokban vagy radiánban megadott értékei formájában is eljuttathatók a végfelhasználóhoz. A harmadik típusú kimeneti adatreprezentáció a kvaternionok felhasználásával történik. A GPS-től származó kimeneti helyzetkoordinátákat az ECEF (Earth Centered Earth Fixed) koordináta-rendszerben küldjük. A GPS által becsült sebesség mértékegysége m/s. Az alkalmazott beágyazott légköri nyomásmagasságmérő belső hőmérséklet-kompenzációval jellemezhető. Lehetővé teszi a légköri nyomás mérését 20 és 110 kPa közötti tartományban, 1,5 Pa felbontással. 30 cm-es felbontással használható az érzékelő magasságának becslésére. Az érzékelő földrajzi helymeghatározása a GPS-modul segítségével kerül kiszámításra. A GPS soros kommunikációs buszon keresztül kapcsolódik a mikroprocesszorhoz. A koordináták becslésének minőségének javítása érdekében lehetőség van a GPS differenciális korrekciók (DGPS) átvitelére. A GPS kimenete az ECEF (Earth Centered Earth Fixed) koordinátarendszerben van, a frekvencia pedig 10 Hz.
A bemutatott INS érzékelő térfogata házzal együtt 4 cm3 alatti és súlya 8,86 . Az érzékelő ilyen mérete lehetővé teheti a robotok tervezői számára, hogy a jelentős méretű eszközökről a mikroméretű tervek felé mozduljanak el. A maximális gyorsulás érzékelő képes ellenállni 500 , míg a bemeneti feszültség 3,5 és 8V között van, és az áramfelvétel 50 mA. A háznak két különböző típusa van, amely lehetővé teszi az érzékelő különböző helyeken történő rögzítését. A legkisebb Micro változat (10. ábra) mérete a rögzítéssel együtt 32,7 x 14,9 x 8,0 . Az MCX-csatlakozóval ellátott változat (3b. ábra) mérete 32,7 x 14,9 x 12,1 . A kibővített változat térfogata 6 cm3 alatt van. Az érzékelő -40°C-tól 80°C-ig széles hőmérséklet-tartományban működhet.
Az összes változat fizikai méretei az 5. táblázatban találhatók..

10. ábra.
Az inerciális navigációs rendszer MCX csatlakozóval ellátott NYÁK elülső (a) és hátsó (b) oldala.
| INS típus | Dim. X | Dim. Y | Dim. Z | Egység | Volumen | |
| Mikro verzió | 32.7 | 14.9 | 8.0 | mm | 3.897 cm3 | |
| Extended változat | 32.7 | 14.9 | 12.1 | mm | 5.895 cm3 | |
| Közös paraméterek | Min. | Típus | Max. | Egység | ||
| Súly (ház nélkül) | – | 3.67 | – | gramm | ||
| Súly (ház nélkül) | – | 8.86 | – | gramm | ||
| Működési hőmérséklet | -40 | – | 80 | °C | ||
| Tárolási hőmérséklet | -Tárolási hőmérséklet | -60 | – | 100 | °C | |
| Maximális gyorsulás | – | 500 | – | g | ||
| Bemeneti feszültség | 3.5 | 5.0 | 6.0 | V | ||
| Áram | 40 | 50 | 60 | mA | ||
5. táblázat.
Az érzékelő fizikai jellemzői.
A kalibrált tengelyek orientációit a felső oldalon gravírozzák és színezik, ahogy az az ábrán látható. 11.

11. ábra.
Az INS szerelési séma. a) Micro-Mounting változat, b) Extended változat.
A bemutatott INS-t a legkisebb, 2 alatti térfogatú IMU-val hasonlították össze. Mind a mérési, mind a mérettengelyek a 12ab. ábrán jelölve vannak. A mikro IMU 5 X mérete 18,6, ami az INS méretének kb. 57%-a. Az Y méret 14,7, ami az INS méretének kb. 99%-a, és az IMU Z mérete többé-kevésbé megegyezik az INS mikrováltozatának 91%-ával és a kiterjesztett változat 60%-ával. Az IMU kibővített LEMO változata azonban 18, ami az INS mikrováltozatának 225%-a. A térfogat alapján történő összehasonlítás csak azt a megállapítást teszi lehetővé, hogy az INS mikro változata kevesebb mint kétszer nagyobb (az IMU mikro változatának 195%-a).

12. ábra.
A javasolt INS (b) összehasonlítása a világ legkisebb IMU-jával (a). A mérési tengelyek be vannak rajzolva a képbe. c) A bemutatott INS és IMU szerelési méretének összehasonlítása, d) A javasolt INS és az IMU külső jellemzőinek összehasonlítása.