Sensoreiden pienentäminen
Tarpeen elektronisten laitteiden kasvavaan pienentämiseen, jotta niitä voitaisiin käyttää jokapäiväisissä työvälineissä, miniatyyriroboteissa ja miehittämättömissä ilma-aluksissa, odotetaan pysähtyvän muutamaksi vuodeksi, ennen kuin hypätään edelleen mikro- ja nanokokoisista laitteista. Siksi markkinoilla tällä hetkellä saatavilla olevia inertiamittausyksiköitä on tarkasteltava uudelleen. Markkinoilla on saatavilla useita kaupallisia inertiamittausyksiköitä. Esimerkiksi 3DM-GX 1 MicroStrainilta, MTi-G Xsens Technologiesilta, Crista IMU Cloud Cap Technologylta, μNAV Crossbow Technologylta, AHRS200AV2.5 Rotomotionilta ja ADIS 16400/405 Analog Devicesiltä. Mainittujen ratkaisujen ominaisuuksien todentamiseksi olemme verranneet niiden ominaisuuksia tekstin kirjoittajien kehittämän nykyaikaisen miniatyyri-MEMS-IMU 5:n ominaisuuksiin. Vertailu on nähtävissä välilehdellä. 1.
Nykytilanteen IMU 5 10-DOF mahdollistaa kulmien mittaamisen kolmessa ulottuvuudessa, kiihtyvyyksien mittaamisen myös kolmessa ulottuvuudessa, voimakkaimman magneettisignaalin suunnan ja ympäristön lämpötilan mittaamisen. Siinä hyödynnetään MEMS-tekniikkaa anturin koon ja painon pienentämiseksi. Anturi painaa vain 1,13 ilman kiinnitystä ja 3,13 vakioasennuksella.
Mittaustiedot IMU 5 -anturista voidaan versiosta riippuen lähettää USB- tai CAN-väylän tai RS-232:n kautta, jotka ovat tyypillisiä alan tiedonsiirtostandardeja. Nykyaikaisilta antureilta vaaditaan joustavuutta, jotta ne voidaan integroida olemassa oleviin järjestelmiin. Samasta syystä anturissa on joustava lähtötietojen konfigurointi. Anturin ulostulo voidaan saada kolmena versiona: anturin raakadatana, kalibroinnin ja lämpötilakompensoinnin jälkeisenä datana tai käsittelysuodattimen ulostulona. Antureiden tiedot voidaan myös toimittaa käyttäjälle eri muodoissa. Ensimmäinen muoto on kiertomatriisi, joka luodaan laitteesta saatujen tietojen perusteella. Tiedot voidaan toimittaa loppukäyttäjälle myös Eulerin kulmina ja niiden arvoina asteina tai radiaaneina. Kolmas tulostiedon esitystapa on kvaternionien avulla.
Mikromittausyksikön toimintakaava on esitetty kuvassa 3 ja sisäiset ominaisuudet välilehdellä. 2.
Yksi inertia-antureista on gyroskooppi, joka mittaa kulmanopeutta Ω (kaaviossa GYRO(X), GYRO(Y), GYRO(Z)). Nämä anturit on suunnattu siten, että niiden mittausakselit muodostavat oikeakätisen kartesiolaisen koordinaatiston. Analogisten MEMS-tyyppisten signaalien ulostulo suodatetaan konfiguroitavalla alipäästösuodattimella (12,5, 25, 50, 110 Hz). Suodatuksen jälkeen signaali muunnetaan digitaaliseen muotoon analogi-digitaalimuuntimella, jolle on ominaista 16-bittinen resoluutio. Digitaalista signaalia voidaan edelleen suodattaa konfiguroitavilla ali- ja ylipäästösuodattimilla. Gyroskoopeista saatavien tietojen taajuudeksi voidaan asettaa 100, 200, 400 tai 800 Hz. Mittausten resoluutio voidaan konfiguroida muunnetulla tarkkuudella välillä 250 °/s-2000 °/s.
Toinen tärkeä elementti kaaviossa on lineaaristen kiihtyvyysantureiden lohko (kaaviossa ACC(X), ACC(Y), ACC(Z)). Anturit suunnattiin siten, että mittausakselit luovat myös oikeakätisen kartesiolaisen koordinaatiston. Antureiden MEMS-lähtöjen analogiset signaalit ohjattiin suodattimeen ja edelleen analogi-digitaalimuunnin. Mitattujen kiihtyvyyksien enimmäisresoluutio voidaan määrittää ±2/±4/±8 (g ≇9,81m/s2). Kiihtyvyysmittareiden herkkyydeksi mitattiin 1 .
| Tuottaja | MicroStrain | Xsens Technologies | Pilvikork. Technology | |
| Model | 3DM-GX1 | MTi-G | Crista IMU | |
| Sisäiset anturit | kiihtyvyysmittarit, gyroskoopit, magnetometrit, lämpötila-anturi | kiihdytysmittarit, magnetometrit, gyroskoopit, GPS | kiihdytysmittarit, gyroskoopit, lämpötila-anturi | |
| Gyroskoopit alue | ± 300°/sek | ± 300°/sek | ± 300°/sek | ± 300°/sek |
| Kiihtyvyysmittarit alue | ± 5 g | ± 5 g | ± 10 g | |
| Digitaalilähtö | RS-232, RS-485 | RS-232, USB | RS-232, CAN | |
| Lämpötila-alue | -40°C:sta +70°C:seen | -20°C:sta +60°C:seen | -40°C:sta +70°C:seen | |
| Koko kiinnityksen kanssa | 64x90x25 | 58x58x33 | 52.07×38.8×25.04 | |
| Paino | 75 | 68 | 38.6 | |
| Tuottaja | Crossbow Technology | Analog Devices | Rotomotion | |
| Malli | μNAV | ADIS 16400/405 | AHRS200AV2.5 | |
| Sisäiset anturit | kiihtyvyysmittarit, gyroskoopit, magnetometrit, lämpötila-anturi, GPS | kiihtyvyysmittarit, magnetometrit, gyroskoopit, lämpötila-anturi | kiihtyvyysmittarit, gyroskoopit, magnetometrit | |
| Gyroskoopit alue | ± 150°/s | ± 75-300°/sek | ± 90°/sek | |
| Kiihtyvyysmittarit alue | ± 2 g | ± 18 g | ± 2 g | |
| Digitaalinen ulostulo | RS-232 | SPI | RS-232, Ethernet | |
| Lämpötila-alue | -5°C:sta +45°C:seen | -40°C:sta +85°C:seen | -5°C:sta +75°C:seen | |
| Koko kiinnityksen kanssa | 57x45x11 | 31.9×23.5×22.9 | ”/>100x100x100 | |
| Paino | 33 | 16 | ”/>100 |
Taulukko 1.
Markkinoilla tällä hetkellä saatavilla olevien miniatyyri-inertiamittausyksiköiden vertailu.

Kuva 3.
IMU:n toimintasuunnitelma.
Seuraava toimintolohko mittaa maan magneettikentän magnetometrien avulla (skeemassa MAG(X), MAG(Y), MAG(Z)). Antureiden mittausakselit on suunnattu oikeakätisessä kartesiankoordinaatistossa. Antureiden analoginen ulostulo liitetään analogi-digitaalimuunninlohkoon ja edelleen konfiguroitavissa olevaan suodatinlohkoon. Suurimmat mahdolliset mitattavat arvot ovat välillä 1.3-81. resoluution ollessa 1/1055 .
Viimeinen toiminnallinen lohko sisältää lämpömittarin, joka mittaa IMU:n ympäristön lämpötilaa kiihtyvyysmittareiden, gyroskooppien ja magnetometrien lukemien lämpötilakompensointia varten.
Kaikki toiminnalliset lohkot on kytketty keskusyksikköön, joka on merkitty kaavioon uProcessor. Algoritmien parametrien tallentamiseksi lisättiin lisämuistia (merkitty kaaviossa eeprom). Keskusyksikkö suorittaa suodatuksen ennen kuin tiedot ohjataan CAN- tai USB- tai RS-232-ulostuloon. Suodatusalgoritmin parametrien määrittämiseksi tarvitaan kalibrointivaihe.
| sisäiset anturit | kiihtyvyysmittarit, gyroskoopit, magnetometrit, lämpötila-anturi | Gyroskoopit vaihteluväli | ± 250 – 2000°/s |
| Kiihtyvyysmittarit vaihteluväli | ± 2 – ± 8 g | Digitaalinen ulostulo | CAN-, USB- tai RS-232-liitäntä |
TAULUKKO 2.
Esitellyn inertiamittausyksikön sisäiset ominaisuudet.
Esitellyn IMU-anturin tilavuus on kotelon kanssa alle 2cm3 ja painaa 3.13. Tällaisen kokoisen anturin avulla robottien suunnittelijat voivat siirtyä huomattavan kokoisista laitteista mikromittakaavan malleihin. Suurin kiihtyvyys, jonka anturi kestää, on 500 , kun taas syöttöjännite on 3,5-8 V ja virrankulutus 35 mA. Koteloa on kolmea eri tyyppiä, jotka mahdollistavat anturin kiinnittämisen eri paikkoihin. Pienimmän Micro-version (kuva 4) koko kiinnityksen kanssa on 18,6 x 14,7 x 7,3 . Versio, jossa on ylimääräiset kiinnitysreiät Micro-Mounting-versio (kuva 5a) on kooltaan 18,6 x 20,7 x 7,3 . Micro- ja Micro-Mounting-versioiden koteloissa on versiosta riippuen USB- tai RS-TTL-liitin. On myös laajennettu versio, jossa on kiinnitysreiät ja koteloon upotettu LEMO-pistoke (kuva 5b). Sen koko on 32,0 x 18,0 x 16,5 .
Kaikkien versioiden fyysiset mitat on esitetty taulukossa 3..

Kuva 4.
Inertiamittausyksikön etu- ja takapuoli.
Kalibroitujen akselien suunnat on kaiverrettu ja väritetty yläpuolelle kuvassa 5 esitetyllä tavalla. Yksittäisen kiinnikkeen koko on 6,15 mm Micro-Mounting-versiossa ja 6,50 mm Extended LEMO -versiossa.
Varten IMU:n soveltamista fyysisiin kohteisiin tehtiin vertailu markkinoiden pienimpien saatavilla olevien antureiden välillä, jotta voitiin varmistaa autonomisten liikkuvien ajoneuvojen navigointimahdollisuudet. Vertailututkimukset suunniteltiin prototyypin asetettujen parametrien tarkistamiseksi, mittausvirheiden syiden analysoimiseksi ja sen tarkistamiseksi, miten testit suorittaneet anturit käyttäytyvät ääritilanteissa. Testeissä käytettiin kahta suosittua kaupallista pienoisanturia: MTiG-28G XSens Technologiesilta ja Crista IMU Microstrainilta (kuva 6b).
| IMU-tyyppi | Dim. X | Dim. Y | Dim. Z | Yksiköt | Tilavuus | |
| Mikroversio | 18.6 | 14.7 | 7.3 | mm | 1,996 cm3 | |
| Mikroasennusversio | 18.6 | 20.7 | 7.3 | mm | 2,811 cm3 | |
| Laajennettu versio | 32.0 | 16.5 | 18.0 | mm | 9,504 cm3 | |
| Yleiset parametrit | Min. | Type | Max. | Yksiköt | ||
| Paino (ilman koteloa) | – | 1.13 | – | grammaa | ||
| Paino (kotelon kanssa) | – | 3.13 | – | grammaa | ||
| Käyttölämpötila | -40 | – | – | 80 | °C | |
| Säilytyslämpötila | -60 | – | 100 | °C | ||
| Maksimaalinen kiihtyvyys | – | 500 | – | g | ||
| Syöttöjännite | 3.5 | 5.0 | 6.0 | V | ||
| Virta | 30 | 35 | 40 | mA | ||
Kaavio 3.
Asensorin fyysiset ominaisuudet.

Kuva 5.
Mikro-IMU:n kiinnityskaavio. a) Micro-Mounting-versio, b) laajennettu LEMO-versio.

Kuva 6.
A) Esitetyn IMU:n koon vertailu markkinoilla saatavilla oleviin tuotteisiin, b) IMU:n vertailualusta. Esitetty IMU on merkitty punaisella ellipsillä. Kuvan vasemmassa reunassa näkyy Crista IMU. Toisella puolella näkyy XSense Technologiesin MtiG Imu.
Vertailevia tutkimuksia varten suunniteltiin, valmistettiin ja käytettiin kalibrointialusta (kuva 6b). Kaikki testatut IMU:t asennettiin alustaan ja niiden raakatiedot kalibroitiin kaikkien antureiden yhteiseen koordinaattijärjestelmään käyttäen esitettyä kalibrointimenetelmää. Useita testejä suoritettiin: raakadatan vertailu, suodatetun datan vertailu, antureiden aikavakaus ja lämpötilakompensointikyky. Kuvassa 7a on esitetty esitetyn IMU-anturin kiihtyvyysmittareiden lukemien vertailu (kaaviossa CZK) ja MTiG-anturin lukemien vertailu (kaaviossa MTI) ja kuvassa 7b on esitetty gyroskooppien vertailu. Molemmat vertailut on tallennettu liikkeen aikana.
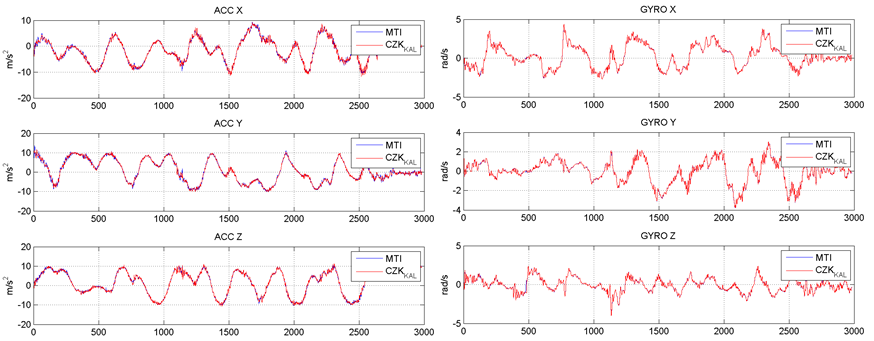
Kuvio 7.
Esimerkkikaavio esitellyn IMU-sensorin ja markkinoilla saatavilla olevien sensoreiden vertailevista tutkimuksista. Esitetty IMU-anturi on merkitty nimellä CZK ja XSens Technologiesin MTiG-anturi on merkitty nimellä MTI. Aikayksiköt ovat . a) kiihtyvyysmittareiden lukemat, b) gyroskooppien lukemat.
Voidaan huomata, että esitetyn kalibroidun anturin ja referenssianturin lähtötiedot ovat lähes samat. Erojen mittaamiseksi olemme arvioineet signaalin raakadatasta ja erottaneet sen kohinakomponentista. Esittelyyn valittiin esimerkkinä vain gyroskoopin Y-mittausakseli. Valinta oli mahdollinen, koska saavutetut tulokset ovat vertailukelpoisia akselista ja anturista riippumatta (magnetometrit, kiihtyvyysanturit tai gyroskoopit). Kuvan 8 oikeassa osassa esitetään, että MTi-G28:n ja anturimme kohinan keskihajonta on noin 0,04, kun taas Crista IMU:n tulos on noin 0,12. Tämä on hyvä esimerkki. MTi-G28:n ja anturimme standardipoikkeaman ero on vain 0,0035, jota ihmissilmä ei yleensä pysty erottamaan toisistaan.
Lisätaulukot signaalin ja kohinan välisestä kertoimesta on esitetty välilehdessä.
Tärkeä ongelma inertiamittausyksiköissä on lähtötietojen aikavakaus. Olemme suorittaneet sarjan vakaustestejä, joiden kesto on 4 tuntia. Kuvassa 9 esitetyt tulokset saatiin sen jälkeen, kun keskiarvo oli laskettu kunkin testissä olleen IMU:n viidestä näytteestä. Voidaan tehdä kaksi päähavaintoa. Ensinnäkin MTi-G28:n ja IMU:n tulokset ovat vertailukelpoisia. Saavutettujen keskiarvojen ero on vain 0,00027 ja keskihajonta-arvojen ero on 0,00226, mikä on jopa pienempi kuin liikettä sisältävän testin aikana. Toinen havainto on, että anturimme ja MTi-G28:n tulokset ovat yli 20 kertaa lähempänä todellista 0-arvoa.

Kuva 8.
Testattujen antureiden (MTiG-28, Crista IMU ja meidän anturimme) gyroskooppien Y-akselilta liikkeen aikana saatujen lähtötietojen vertailu. Ajan yksiköt ovat .
| Crista IMU (S/NKAL) | MTiG (S/ NKAL) | IMU 5 (S/NKAL) | |
| Kiihtyvyysmittarit | 20,3 | 38,1 | 43,2 |
| Magnetometrit | N/A | 719,3 | 767,9 |
| Gyroskoopit | 13,6 | 206,7 | 254,5 |
Taulukko 4.
Testattujen IMU:iden signaali-kohinakertoimen vertailu. (Mitä suurempi arvo, sitä parempi).
GPS:n maailmanlaajuinen saatavuus, lukemien suhteellisen suuri luotettavuus ja se, ettei lisäinfrastruktuuria tarvita, ovat tärkeimmät syyt siihen, että useimmat nykyaikaiset inertiasuunnistusjärjestelmät käyttävät GPS:ää. INS-järjestelmille on tyypillisesti ominaista nopea päivitysnopeus ja pieni mutta rajoittamaton virhe. GPS:n virhe on rajattu, mutta päivitysaika on hidas eikä asennon arviointi ole luotettava. Useimpien GPS-moduulien suljetun arkkitehtuurin vuoksi suosituin fuusiointimenetelmätyyppi on niin sanottu kytkemätön tai löyhästi kytketty apu. INS:ää ja GPS:ää käytetään ajoneuvojen turvajärjestelmissä ajoneuvon sivuluisun arviointiin. Vakiokäyttö liittyy ajoneuvon ohjaukseen ja navigointiin. GPS-signaali edellyttää selkeää näkyvyyttä satelliiteille, mikä ei useinkaan ole mahdollista kanjonissa, erityisesti kaupunkien kanjoniympäristöissä. GPS/INS-järjestelmiä hyödynnetään usein nelikopterin navigoinnissa tai ohjusten ohjauksessa.

Kuva 9.
Testattujen antureiden (MTiG-28, Crista IMU ja meidän anturimme) gyroskooppien Y-akselin lähtötietojen vertailu stabiliteettitestin aikana. Jokainen arvo kaaviossa on anturin 5 näytteen keskiarvo.
Olemme kehittäneet inertiasuunnistusjärjestelmän täydellisenä navigointiratkaisuna, joka on upotettu yhteen piirilevyyn. Se sisältää edellä esitellyn 10-DOF inertiamittausyksikön yhdessä GPS-moduulin (Global Positioning System) kanssa. GPS:n korkeusarvion epätarkkuuden kompensoimiseksi siihen on upotettu ylimääräinen barometri. Kuvattu INS mahdollistaa kulmien mittaamisen kolmessa ulottuvuudessa, kiihtyvyyden mittaamisen myös kolmessa ulottuvuudessa, voimakkaimman magneettisignaalin suunnan ja ympäristön lämpötilan mittaamisen. Siinä hyödynnetään MEMS-tekniikkaa anturin koon ja painon pienentämiseksi. MCX-liittimellä varustettu INS:n piirilevy painaa 3,67 grammaa ilman kiinnitystä ja 8,86 grammaa vakioasennuksella.
Mittaustiedot anturista voidaan versiosta riippuen lähettää USB- tai CAN-väylän kautta, jotka ovat tyypillisiä teollisuuden tiedonsiirtostandardeja. Nykyaikaisilta antureilta vaaditaan joustavuutta, jotta ne voidaan integroida olemassa oleviin järjestelmiin. Samasta syystä anturissa on joustava lähtötietojen konfigurointi. Anturin ulostulo voidaan saada kolmena versiona: anturin raakadatana, kalibroinnin ja lämpötilakompensoinnin jälkeisenä datana tai käsittelysuodattimen ulostulona. Antureiden tiedot voidaan myös toimittaa käyttäjälle eri muodoissa. Ensimmäinen muoto on kiertomatriisi, joka luodaan laitteesta saatujen tietojen perusteella. Tiedot voidaan toimittaa loppukäyttäjälle myös Eulerin kulmina ja niiden arvoina asteina tai radiaaneina. Kolmas lähtötietojen esitystapa on kvaternionien käyttö. GPS:n antamat sijaintikoordinaatit lähetetään ECEF-koordinaattijärjestelmässä (Earth Centered Earth Fixed). GPS:n arvioiman nopeuden yksikkö on m/s. Käytettyyn upotettuun ilmanpaineen korkeusmittariin on ominaista sisäinen lämpötilakompensointi. Sen avulla voidaan mitata ilmanpainetta 20-110 kPa:n välillä 1,5 Pa:n tarkkuudella. Sen avulla voidaan arvioida anturin korkeus 30 cm:n tarkkuudella. Anturin maantieteellinen paikannus lasketaan GPS-moduulin avulla. GPS on kytketty mikroprosessoriin sarjaliikenneväylällä. Koordinaattien arvioinnin laadun parantamiseksi on mahdollista käyttää GPS:n differentiaalikorjauksia (DGPS). GPS:n ulostulo on ECEF-koordinaattijärjestelmässä (Earth Centered Earth Fixed) ja taajuus on 10 Hz.
Esitetty INS-anturi on kotelon kanssa alle 4 cm3 ja painaa 8,86 . Tällaisen kokoisen anturin avulla robottien suunnittelijat voivat siirtyä huomattavan kokoisista laitteista mikromittakaavan malleihin. Suurin kiihtyvyys, jonka anturi kestää, on 500 , kun taas syöttöjännite on 3,5-8 V ja virrankulutus 50 mA. Koteloa on kahta eri tyyppiä, jotka mahdollistavat anturin kiinnittämisen eri paikkoihin. Pienimmän Micro-version (kuva 10) koko kiinnityksen kanssa on 32,7 x 14,9 x 8,0 . MCX-liittimellä varustettu versio (kuva 3b) on kooltaan 32,7 x 14,9 x 12,1 . Laajennetun version tilavuus on alle 6 cm3 . Anturi voi toimia laajalla lämpötila-alueella -40 °C:sta 80 °C:een.
Kaikkien versioiden fyysiset mitat on esitetty taulukossa 5..

Kuva 10.
Inertiasuunnistusjärjestelmän piirilevyn etupuoli (a) ja takapuoli (b) MCX-liittimellä.
| INS tyyppi | Dim. X | Dim. Y | Dim. Z | Yksiköt | Tilavuus | |
| Mikroversio | 32.7 | 14.9 | 8.0 | mm | 3.897 cm3 | |
| Laajennettu versio | 32.7 | 14.9 | 12.1 | mm | 5.895 cm3 | |
| Yleiset parametrit | Min. | Tyyppi | Max. | Yksiköt | ||
| Paino (ilman koteloa) | – | 3.67 | – | grammaa | ||
| Paino (ilman koteloa) | – | 8.86 | – | grammaa | ||
| Käyttölämpötila | -40 | – | – | 80 | °C | |
| Säilytyslämpötila | -60 | – | 100 | °C | ||
| Maksimaalinen kiihtyvyys | – | 500 | – | g | ||
| Syöttöjännite | 3.
Asensorin fysikaaliset ominaisuudet. Kalibroitujen akselien suunnat on kaiverrettu ja väritetty yläpuolelle kuvassa esitetyllä tavalla. 11.  Kuva 11.Insinöörin kiinnityskaavio. a) Micro-Mounting-versio, b) Extended-versio. Esiteltyä INS:ää verrattiin pienimpään IMU:hun, jonka tilavuus oli alle 2 . Sekä mitta- että kokoakselit on merkitty kuvaan 12ab. Mikro-IMU 5:n X-mitta on 18,6, mikä on noin 57 % INS:n koosta. Y-mitta on 14,7, mikä on noin 99 prosenttia INS:n koosta, ja IMU:n Z-koko on suurin piirtein 91 prosenttia INS:n mikroversiosta ja 60 prosenttia laajennetusta versiosta. IMU:n laajennetun LEMO-version koko on kuitenkin 18, mikä on 225 % INS:n mikroversiosta. Tilavuuteen perustuvan vertailun perusteella voidaan vain todeta, että INS:n mikroversio on alle kaksi kertaa suurempi (195 % IMU:n mikroversiosta).  Kuva 12.Ehdotetun INS:n (b) vertailu maailman pienimpään IMU:hun (a). Mittausakselit on piirretty kuvaan. c) Esitetyn INS:n ja IMU:n asennuskoon vertailu, d) Ehdotetun INS:n ja IMU:n ulkoisten ominaisuuksien vertailu. |
|||||