Miniaturizarea senzorilor
Nevoia de miniaturizare din ce în ce mai mare a dispozitivelor electronice pentru a le utiliza în uneltele de zi cu zi, în roboții miniaturali și în vehiculele aeriene fără pilot se preconizează că se va opri pentru câțiva ani înainte de a trece mai departe de la dispozitivele de dimensiuni micro la cele de dimensiuni nano. Prin urmare, unitățile de măsurare inerțială disponibile în prezent pe piață trebuie revizuite. Există mai multe unități comerciale de măsurare inerțială disponibile pe piață. De exemplu, 3DM-GX 1 de la MicroStrain, MTi-G de la Xsens Technologies, Crista IMU de la Cloud Cap Technology, μNAV de la Crossbow Technology, AHRS200AV2.5 de la Rotomotion și ADIS 16400/405 de la Analog Devices. Pentru a verifica capacitățile soluțiilor menționate, am comparat caracteristicile acestora cu cele ale IMU 5 MEMS miniaturale de ultimă generație dezvoltate de autorii textului. Comparația este vizibilă în fila. 1.
Actualul IMU 5 10-DOF de ultimă generație permite măsurarea unghiurilor în trei dimensiuni, a accelerațiilor tot în trei dimensiuni, a direcției celui mai puternic semnal magnetic și a temperaturii mediului înconjurător. Acesta utilizează tehnologia MEMS pentru a reduce atât dimensiunea, cât și greutatea senzorului. Senzorul cântărește doar 1,13 fără montaj și 3,13 cu montajul standard.
Datele de măsurare de la senzorul IMU 5, în funcție de versiune, pot fi trimise prin USB sau CAN bus sau RS-232, care sunt standarde industriale tipice de transfer de date. Flexibilitatea este necesară de la senzorii moderni pentru a-l integra într-un sistem existent. Din același motiv, senzorul are o configurație flexibilă a datelor de ieșire. Ieșirea senzorului poate fi achiziționată în trei versiuni: ca date brute ale senzorului, ca date după calibrare și compensare de temperatură sau ca ieșire a filtrului de procesare. Datele provenite de la senzori, pot fi, de asemenea, livrate în diferite forme către utilizator. Prima formă este matricea de rotație, care este generată pe baza datelor provenite de la dispozitiv. Datele pot fi, de asemenea, furnizate utilizatorului final sub formă de unghiuri Euler și valorile lor date în grade sau în radiani. Al treilea tip de reprezentare a datelor de ieșire este prin utilizarea quaternionilor.
Schema de funcționare a microunității de măsurare este prezentată în fig. 3, iar caracteristicile interne în tab. 2.
Unul dintre senzorii inerțiali fundamentali este giroscopul care măsoară viteza unghiulară Ω (în schema GYRO(X), GYRO(Y), GYRO(Z)). Acești senzori au fost orientați în așa fel încât axele lor de măsurare să creeze un sistem de coordonate carteziene drepte. Ieșirea semnalelor analogice de tip MEMS este filtrată de un filtru trece-jos configurabil (12,5, 25, 50, 110 Hz). După filtrare, semnalul este convertit în formă digitală cu ajutorul unui convertor analog-digital caracterizat printr-o rezoluție de 16 biți. Semnalul digital poate fi filtrat în continuare prin filtre trece-jos și trece-înalt configurabile. Frecvența datelor de la giroscoape poate fi setată la 100, 200, 400 sau 800 Hz. Rezoluția măsurătorilor poate fi configurată cu o precizie modificată în intervalul de la 250 °/s la 2000 °/s.
Un alt element important în schemă este blocul de senzori de accelerații liniare (în schemă ACC(X), ACC(Y), ACC(Z)). Senzorii au fost orientați în așa fel încât axele de măsurare să creeze, de asemenea, un sistem de coordonate carteziene drepte. Semnalele analogice de la ieșirea MEMS a senzorilor au fost redirecționate către filtru și apoi către convertorul analog-digital. Rezoluția maximă a accelerațiilor măsurate poate fi configurată la ±2/±4/±8 (g ≇9,81m/s2). Sensibilitatea accelerometrelor a fost măsurată ca fiind 1 .
| Producător | MicroStrain | Xsens Technologies | Cloud Cap Technology | |
| Modelul | 3DM-GX1 | MTi-G | Crista IMU | |
| Senzori interni | accelerometre, giroscoape, magnetometre, senzor de temperatură | accelerometre, magnetometre, giroscoape, GPS | accelerometre, giroscoape, senzor de temperatură | |
| Giroscoape gama | ± 300°/sec | ± 300°/sec | ± 300°/sec | ± 300°/sec |
| Faza de acțiune a accelerometrelor | ± 5 g | ± 5 g | ± 10 g | |
| Stație digitală | RS-.232, RS-485 | RS-232, RS-485 | RS-232, USB | RS-232, CAN |
| Domeniul de temperatură | -40°C până la +70°C | -20°C până la +60°C | -40°C până la +70°C | |
| Dimensiuni cu montare | 64x90x25 | 58x58x33 | 52.07×38.8×25.04 | |
| Greutate | 75 | 68 | 38.6 | |
| Producător | Crossbow Technology | Analog Devices | Rotomotion | |
| Model | μNAV | ADIS 16400/405 | AHRS200AV2.5 | |
| Senzori interni | accelerometre, giroscoape, magnetometre, senzor de temperatură, GPS | accelerometre, magnetometre, giroscoape, senzor de temperatură | accelerometre, giroscoape, magnetometre | |
| Giroscoape gama | ± 150°/sec | ± 75-300°/sec | ± 90°/sec | |
| Gama accelerometrelor | ± 2 g | ± 18 g | ± 2 g | |
| Ieșire digitală | RS-232 | SPI | RS-232, Ethernet | |
| Domeniul de temperatură | -5°C până la +45°C | -40°C până la +85°C | -5°C până la +75°C | |
| Dimensiuni cu montaj | 57x45x11 | 31.9×23.5×23.5×22.9 | „/>100x100x100 | |
| Greutate | 33 | 16 | „/>100 |
Tabel 1.
Compararea unităților miniaturale de măsurare inerțială disponibile în prezent pe piață.

Figura 3.
Schema de funcționare a IMU.
Postul bloc funcțional măsoară câmpul magnetic terestru cu ajutorul magnetometrelor (în schema MAG(X), MAG(Y), MAG(Z)). Axele de măsurare ale senzorilor sunt orientate în sistemul de coordonate carteziene drepte. Ieșirea analogică de la senzori este conectată la un convertor analog-digital și apoi la un bloc de filtre configurabile. Valorile maxime care pot fi măsurate sunt cuprinse între 1,3 și 81, cu o rezoluție de 1/1055.
Ultimul bloc funcțional conține un termometru care măsoară temperatura din mediul IMU pentru a permite compensarea în funcție de temperatură a citirilor accelerometrelor, giroscoapelor și magnetometrelor.
Toate blocurile funcționale sunt conectate la unitatea centrală de procesare marcată în schema uProcessor. Pentru a stoca parametrii necesari pentru algoritmi a fost adăugată o memorie suplimentară (marcată în schemă ca eeprom). Unitatea centrală realizează filtrarea înainte ca datele să fie redirecționate către ieșirea CAN sau USB sau RS-232. Pentru a stabili parametrii algoritmului de filtrare este necesară faza de calibrare.
| Senzori interni | accelerometre, giroscoape, magnetometre, senzor de temperatură | Giroscoapele variază | de la ± 250 până la 2000°/sec |
| Accelerometre variază | de la ± 2 până la ± 8 g | Ieșire digitală | CAN, USB sau RS-232 |
Tabelul 2.
Caracteristicile interne ale unității de măsurare inerțială prezentate.
Volumul senzorului IMU prezentat este sub 2cm3 cu carcasă și cântărește 3,13. O astfel de dimensiune a senzorului poate permite proiectanților de roboți să treacă de la dispozitive de dimensiuni considerabile la modele la scară micro. Accelerația maximă pe care senzorul este capabil să o suporte este de 500 , în timp ce tensiunea de intrare este de la 3,5 la 8V, iar consumul de curent este de 35 mA. Există trei tipuri diferite de carcasă care permit fixarea senzorului în diverse locuri. Cea mai mică versiune Micro (fig. 4) dimensiunea cu montaj este de 18,6 x 14,7 x 7,3 . Versiunea cu găurile de montare suplimentare versiunea Micro-Mounting (fig. 5a) are dimensiunea de 18,6 x 20,7 x 7,3 . Cablul de ieșire al carcaselor din versiunea Micro și versiunea Micro-Mounting este prevăzut cu conector USB sau RS-TTL, în funcție de versiune. Există, de asemenea, o versiune extinsă cu găuri de montare și un conector LEMO încorporat în carcasă (fig. 5b). Dimensiunile sale sunt 32,0 x 18,0 x 16,5 .
Măsurătorile fizice ale tuturor versiunilor sunt prezentate în Tab.3.

Figura 4.
Partea din față și cea din spate a unității de măsurare inerțială.
Orientările axelor calibrate sunt gravate și colorate pe partea superioară, așa cum este prezentat în Fig. 5. Dimensiunea montajului unic este de 6,15 mm pentru versiunea Micro-Mounting și de 6,50 mm pentru versiunea LEMO extinsă.
Până la aplicarea IMU în obiectele fizice a fost făcută o comparație între cei mai mici senzori disponibili pe piață pentru a verifica posibilitatea de navigare a vehiculelor mobile autonome. Studiile comparative au fost concepute pentru a verifica parametrii stabiliți pe prototip, pentru a analiza cauzele erorilor de măsurare și pentru a verifica modul în care senzorii, care au efectuat testele se comportă în situații extreme. Pentru teste au fost utilizați doi senzori miniaturali comerciali populari: MTiG-28G de la XSens Technologies și Crista IMU de la Microstrain (fig. 6b).
| Tipul IMU | Dim. X | Dim. Y | Dim. Z | Unități | Volumetru | |
| Versiune micro | 18.6 | 14.7 | 7,3 | mm | 1,996 cm3 | |
| Versiunea de montare micro | 18.6 | 20,7 | 7,3 | mm | 2,811 cm3 | |
| Versiunea extinsă | 32.0 | 16,5 | 18,0 | mm | 9.504 cm3 | |
| Parametri comuni | Min. | Tip | Max. | Unități | ||
| Greutate (fără carcasă) | – | 1,13 | – | gram | ||
| Greutate (cu carcasă) | – | 3.13 | – | grame | ||
| Temperatura de funcționare | -40 | – | 80 | °C | ||
| Temperatura de depozitare | -.60 | – | 100 | °C | ||
| Accelerație maximă | – | 500 | – | g | ||
| Tensiune de intrare | 3.5 | 5,0 | 6,0 | V | ||
| Current | 30 | 35 | 40 | mA | ||
Tabelul 3.
Caracteristica fizică a senzorului.

Figura 5.
Schema de montare a micro IMU. a) Versiunea Micro-Mounting, b) Versiunea LEMO extinsă.

Figura 6.
A) Compararea dimensiunii IMU prezentate cu produsele disponibile pe piață, b) Platforma de comparare a IMU. IMU prezentat este marcat de elipsa roșie. În partea stângă a imaginii se poate observa Crista IMU. În cealaltă parte se poate vedea MtiG Imu de la XSense Technologies.
Pentru a realiza studii comparative a fost proiectată, produsă și utilizată o platformă de calibrare (fig. 6b). Toate IMU-urile testate au fost montate pe platformă, iar datele brute ale acestora au fost calibrate la sistemul de coordonate comun pentru toți senzorii folosind metoda de calibrare prezentată. Au fost efectuate mai multe teste: compararea datelor brute, compararea datelor filtrate, stabilitatea în timp a senzorilor și capacitatea de compensare a temperaturii. În figura 7a este prezentată o comparație a citirilor de la accelerometrele senzorului IMU prezentat (CZK în grafic) și ale senzorului MTiG (MTI în grafic), iar în figura 7b este prezentată comparația giroscoapelor. Ambele comparații au fost înregistrate în timpul mișcării.
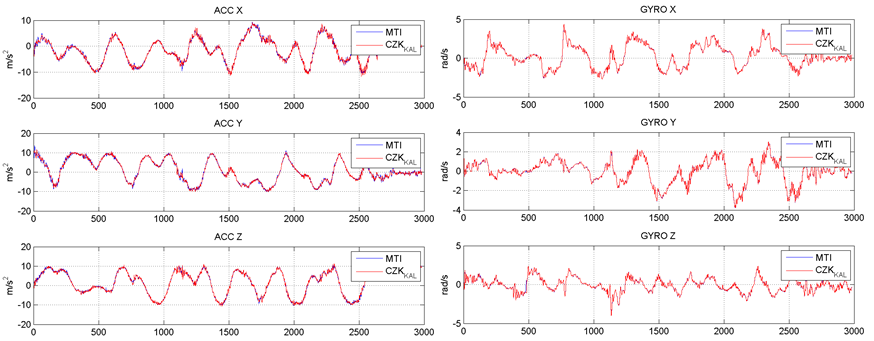
Figura 7.
Un exemplu de grafic din studiile comparative ale senzorului IMU prezentat și ale senzorilor disponibili pe piață. Senzorul IMU prezentat este etichetat ca CZK, iar senzorul MTiG de la XSens Technologies este etichetat MTI. Unitățile de timp sunt . a) citirile de la accelerometre, b) citirile de la giroscoape.
Se poate observa că datele de ieșire ale senzorului calibrat prezentat și ale senzorului de referință sunt aproape identice. Pentru a măsura diferențele, am estimat semnalul din datele brute și l-am separat de componenta de zgomot. Doar axa de măsurare a giroscopului Y a fost aleasă ca exemplu de prezentare. Alegerea a fost posibilă deoarece rezultatele obținute sunt comparabile indiferent de axă și de senzor (magnetometre, accelerometre sau giroscoape). În partea dreaptă a fig. 8 este prezentat faptul că abaterea standard a zgomotului pentru MTi-G28 și senzorul nostru este de aproximativ 0,04, în timp ce rezultatul obținut de Crista IMU este de aproximativ 0,12. Diferența dintre deviația standard a MTi-G28 și a senzorului nostru este de numai 0,0035, ceea ce, de obicei, este imposibil de distins cu ochiul uman.
Corelarea suplimentară în tabel a coeficientului semnal-zgomot este prezentată în tab. 4.
O problemă importantă pentru unitățile de măsurare inerțială este stabilitatea în timp a datelor de ieșire. Am efectuat o serie de teste de stabilitate cu o durată de 4h. Rezultatele prezentate în fig. 9 au fost obținute după calcularea mediei din cinci eșantioane ale fiecărei IMU din cadrul testului. Se pot face două observații principale. În primul rând, că rezultatele MTi-G28 și ale IMU-ului nostru sunt comparabile. Diferența valorilor medii obținute este de numai 0,00027, iar diferența dintre valorile deviației standard este de 0,00226, ceea ce este chiar mai mică decât în timpul testului cu mișcare. A doua observație este că rezultatele senzorului nostru și ale MTi-G28 sunt de peste 20 de ori mai aproape de valoarea reală 0.

Figura 8.
Compararea datelor de ieșire în timpul mișcării de pe axa Y a giroscoapelor pentru senzorii testați (MTiG-28, Crista IMU și senzorul nostru). Unitățile de timp sunt .
| Crista IMU (S/NKAL) | MTiG (S/ NKAL) | IMU 5 (S/NKAL) | |
| Accelerometre | 20,3 | 38,1 | 43,2 |
| Magnetometre | N/A | 719,3 | 767,9 |
| Giroscoape | 13,6 | 206,7 | 254,5 |
Tabelul 4.
Compararea coeficientului semnal/zgomot pentru IMU-urile testate. (Cu cât valoarea este mai mare, cu atât mai bine).
Disponibilitatea globală a GPS-ului, fiabilitatea relativ ridicată a citirilor și lipsa necesității unei infrastructuri suplimentare sunt principalele motive pentru care majoritatea sistemelor moderne de navigație inerțială utilizează GPS-ul. În mod obișnuit, INS poate fi caracterizat de o rată de actualizare rapidă și o eroare mică, dar nemărginită. Eroarea GPS este limitată, însă timpul de actualizare este lent și estimarea atitudinii nu este fiabilă. Din cauza arhitecturii închise a majorității modulelor GPS, cel mai popular tip de metode de fuziune se numește „uncoupled” sau „loosely coupled aiding”. INS cu GPS este utilizat în sistemele de siguranță a vehiculelor pentru estimarea alunecării laterale a unui vehicul. Utilizarea standard implică ghidarea și navigarea vehiculelor. Semnalul GPS necesită o vizibilitate clară a sateliților, ceea ce adesea nu este posibil în canioane, în special în mediile urbane de canioane. Sistemele GPS/INS sunt adesea utilizate pentru navigarea unui quadrocopter sau pentru ghidarea rachetelor.

Figura 9.
Compararea datelor de ieșire în timpul testului de stabilitate de pe axa Y a giroscoapelor pentru senzorii testați (MTiG-28, Crista IMU și senzorul nostru). Fiecare valoare din grafic este o valoare medie a 5 eșantioane de la senzor.
Am dezvoltat un sistem de navigație inerțială ca o soluție completă de navigație încorporată într-un singur PCB. Acesta conține unitatea de măsurare inerțială 10-DOF prezentată mai sus, însoțită de un modul GPS (Global Positioning System). Pentru a compensa precizia scăzută a estimării altitudinii de către GPS, a fost încorporat un barometru suplimentar. INS descris permite măsurarea unghiurilor în trei dimensiuni, a accelerațiilor tot în trei dimensiuni, a direcției celui mai puternic semnal magnetic și a temperaturii mediului înconjurător. Acesta utilizează tehnologia MEMS pentru a reduce atât dimensiunea, cât și greutatea senzorului. Placa de circuit imprimat INS cu conector MCX cântărește 3,67 grame fără montaj și 8,86 grame cu montajul standard.
Datele de măsurare de la senzor, în funcție de versiune, pot fi trimise prin USB sau CAN bus, care sunt standarde industriale tipice de transfer de date. Flexibilitatea este necesară de la senzorii moderni pentru a-l integra într-un sistem existent. Din același motiv, senzorul are o configurație flexibilă a datelor de ieșire. Ieșirea senzorului poate fi achiziționată în trei versiuni: ca date brute ale senzorului, ca date după calibrare și compensare de temperatură sau ca ieșire a filtrului de procesare. Datele provenite de la senzori, pot fi, de asemenea, livrate în diferite forme către utilizator. Prima formă este matricea de rotație, care este generată pe baza datelor provenite de la dispozitiv. Datele pot fi, de asemenea, furnizate utilizatorului final sub formă de unghiuri Euler și valorile lor date în grade sau în radiani. Al treilea tip de reprezentare a datelor de ieșire este prin utilizarea quaternionilor. Coordonatele poziției de ieșire de la GPS sunt trimise în sistemul de coordonate ECEF (Earth Centered Earth Fixed). Unitatea de măsură a vitezei estimate de GPS este m/s. Altimetrul de presiune atmosferică încorporat utilizat este caracterizat de compensarea internă a temperaturii. Acesta permite măsurarea presiunii atmosferice în intervalul de la 20 la 110 kPa cu o rezoluție de 1,5 Pa. Acesta poate fi utilizat pentru a estima altitudinea senzorului cu o rezoluție egală cu 30 cm. Localizarea geografică a senzorului este calculată cu ajutorul modulului GPS. GPS-ul este conectat la microprocesor prin intermediul unei magistrale de comunicații seriale. Pentru a îmbunătăți calitatea estimării coordonatelor, este posibil să se treacă la corecțiile diferențiale GPS (DGPS). Ieșirea de la GPS este în sistemul de coordonate ECEF (Earth Centered Earth Fixed), iar frecvența este de 10 Hz.
Volumul senzorului INS prezentat este sub 4cm3 cu carcasa și cântărește 8,86 . O astfel de dimensiune a senzorului poate permite proiectanților de roboți să treacă de la dispozitive de dimensiuni considerabile la modele la scară micro. Accelerația maximă pe care senzorul este capabil să o suporte este de 500 , în timp ce tensiunea de intrare este de la 3,5 la 8V, iar consumul de curent este de 50 mA. Există două tipuri diferite de carcasă care permit fixarea senzorului în diverse locuri. Cea mai mică versiune Micro (fig. 10) dimensiunea cu montaj este de 32,7 x 14,9 x 8,0 . Versiunea cu conector MCX (fig. 3b) are dimensiunile 32,7 x 14,9 x 12,1 . Volumul versiunii extinse este sub 6 cm3 . Senzorul poate funcționa într-o gamă largă de temperaturi începând de la -40°C până la 80°C.
Măsurătorile fizice ale tuturor versiunilor sunt prezentate în Tab.5.

Figura 10.
Partea din față (a) și cea din spate (b) a PCB-ului sistemului de navigație inerțială cu conector MCX.
| INS tip | Dim. X | Dim. Y | Dim. Z | Unități | Volumetru |
| Versiune micro | 32.7 | 14.9 | 8.0 | mm | 3.897 cm3 |
| Versiunea extinsă | 32.7 | 14.9 | 12.1 | mm | 5.895 cm3 |
| Parametrii comuni | Min. | Tip | Max. | Unități | |
| Greutate (fără carcasă) | – | 3.67 | – | grame | |
| Greutate (cu carcasă) | – | 8.86 | – | grame | |
| Temperatura de funcționare | -40 | – | 80 | °C | |
| Temperatura de depozitare | …60 | – | 100 | °C | |
| Accelerație maximă | – | 500 | – | g | |
| Tensiune de intrare | 3.5 | 5,0 | 6,0 | V | |
| Current | 40 | 50 | 60 | mA | |
Tabelul 5.
Caracteristica fizică a senzorului.
Orientațiile axelor calibrate sunt gravate și colorate pe partea superioară, așa cum se prezintă în Fig. 11.

Figura 11.
Schema de montare a INS. a) Versiunea de micro-montare, b) Versiunea extinsă.
Institutul INS introdus a fost comparat cu cel mai mic IMU cu un volum mai mic de 2 . Atât axele de măsurare, cât și cele de mărime sunt marcate în figura 12ab. Dimensiunea X a micro IMU 5 este de 18,6, ceea ce reprezintă aproximativ 57% din dimensiunea INS. Dimensiunea Y este de 14,7, ceea ce reprezintă aproximativ 99% din dimensiunea INS, iar dimensiunea Z a IMU este mai mult sau mai puțin egală cu 91% din versiunea micro a INS și 60% din versiunea extinsă. Cu toate acestea, versiunea LEMO extinsă a IMU este de 18, ceea ce reprezintă 225% din versiunea micro a INS. Comparația bazată pe volum permite doar să se afirme că versiunea micro a INS este de mai puțin de două ori mai mare (195% din versiunea micro a IMU).

Figura 12.
Compararea INS propus (b) cu cea mai mică IMU din lume (a). Axele de măsurare sunt desenate în imagine. c) Comparația dimensiunii de montare a INS prezentat și a IMU, d) Comparația caracteristicilor externe ale INS propus și ale IMU.
.