Sensores miniaturização
A necessidade de aumentar a miniaturização de dispositivos eletrônicos para usá-los em ferramentas do dia-a-dia, robôs miniatura e UAVs está prevista a parada por alguns anos antes de saltar mais longe dos dispositivos micro para dispositivos de tamanho nanométrico. Portanto, uma unidade de medição inercial atualmente disponível no mercado necessita de uma revisão. Existem várias unidades de medição inercial disponíveis no mercado. Por exemplo 3DM-GX 1 do MicroStrain, MTi-G da Xsens Technologies, Crista IMU da Cloud Cap Technology, μNAV da Crossbow Technology, AHRS200AV2.5 da Rotomotion e ADIS 16400/405 da Analog Devices. A fim de verificar as capacidades das soluções mencionadas, comparamos suas características com o atual estado da arte da miniatura MEMS IMU 5 desenvolvida pelos autores do texto. A comparação é visível no separador. 1.
O estado actual da arte IMU 5 10-DOF permite medir ângulos em três dimensões, acelerações também em três dimensões, direcção do sinal magnético mais forte e a temperatura do ambiente. Utiliza a tecnologia MEMS para reduzir tanto o tamanho como o peso do sensor. O sensor pesa apenas 1,13 sem montagem e 3,13 com a montagem padrão.
Dados de medição do sensor IMU 5 dependendo da versão podem ser enviados através do barramento USB ou CAN ou RS-232 que são padrões típicos da indústria de transferência de dados. A flexibilidade é requerida dos sensores modernos para integrá-lo com um sistema existente. Pela mesma razão, o sensor tem uma configuração flexível dos dados de saída. A saída do sensor pode ser adquirida em três versões: como dados brutos do sensor, como dados após calibração e compensação de temperatura, ou como saída do filtro de processamento. Os dados dos sensores também podem ser entregues ao usuário de várias formas. A primeira forma é a matriz de rotação, que é gerada com base nos dados do dispositivo. Os dados também podem ser fornecidos ao usuário final na forma de ângulos de Euler e seus valores dados em graus ou em radianos. O terceiro tipo de representação dos dados de saída é usando quaternions.
Esquema de funcionamento da unidade de micromedida é apresentado na fig. 3 e as características internas na guia. 2.
Um dos sensores de inércia fundamentais é o giroscópio que mede a velocidade angular Ω (no esquema GYRO(X), GYRO(Y), GYRO(Z)). Esses sensores foram orientados de tal forma que seus eixos de medição criam um sistema de coordenadas cartesianas à direita. A saída de sinais analógicos do tipo MEMS é filtrada por um filtro passa-baixo configurável (12,5, 25, 50, 110 Hz). Após a filtragem, o sinal é convertido para a forma digital por conversor analógico-digital caracterizado por uma resolução de 16 bits. O sinal digital pode ser ainda filtrado por filtros passa-baixo e passa-alto configuráveis. A frequência dos dados dos giroscópios pode ser ajustada para 100, 200, 400 ou 800 Hz. A resolução das medições pode ser configurada com uma precisão modificada na faixa de 250 °/s a 2000 °/s.
Outro elemento importante no esquema é o bloco de sensores de aceleração linear (no esquema ACC(X), ACC(Y), ACC(Z)). Os sensores foram orientados de tal forma que os eixos de medição também criam um sistema de coordenadas cartesianas à direita. Os sinais analógicos dos sensores de saída MEMS foram redirecionados para o filtro e mais adiante para o conversor analógico-digital. A resolução máxima das acelerações medidas pode ser configurada a ±2/±4/±8 (g ≇9.81m/s2). A sensibilidade dos acelerômetros foi medida como 1 .
| Produtor | MicroStrain | Xsens Technologies | Cloud Cap Tecnologia |
| > | |||
| Modelo | 3DM-GX1 | MTi-G | Crista IMU |
| Sensores internos | acelerómetros, giroscópios, magnetómetros, sensor de temperatura | accelerómetros, magnetómetros, giroscópios, GPS | accelerómetros, giroscópios, sensor de temperatura |
| Gircópios | ± 300°/seg | ± 300°/seg | ± 300°/seg |
| Gama de acelerómetros | ± 5 g | ± 5 g | ± 10 g |
| Saída digital | RS-232, RS-485 | RS-232, USB | RS-232, CAN |
| Faixa de temperatura | -40°C a +70°C | -20°C a +60°C | -40°C a +70°C |
| Tamanho com montagem | 64x90x25 | 58x58x33 | >52.07×38,8×25,04 |
| Peso | 75 | 68 | 38.6 |
| Produtor | Tecnologia de Besta Cruzada | Dispositivos Analógicos | Rotomotion |
| Modelo | μNAV | ADIS 16400/405 | AHRS200AV2.5 |
| Sensores internos | accelerómetros, giroscópios, magnetómetros, sensor de temperatura, GPS | accelerómetros, magnetómetros, giroscópios, sensor de temperatura | accelerómetros, giroscópios, magnetómetros |
| Gircópios | ± 150°/seg | ± 75-300°/seg | ± 90°/seg |
| Gama de acelerómetros | ± 2 g | ± 18 g | ± 2 g |
| Saída digital | RS-232 | SPI | RS-232, Ethernet |
| Faixa de temperatura | -5°C a +45°C | -40°C a +85°C | -5°C a +75°C |
| Tamanho com montagem | 57x45x11 | 31.9×23,5×22,9 | “/>100x100x100 |
| Peso | 33 | 16 | “/>100 |
Tabela 1.
Comparação das unidades de medida inercial miniatura actualmente disponíveis no mercado.

Figure 3.
O esquema de operação da IMU.
Próximo bloco funcional mede o campo magnético terrestre usando magnetómetros (no esquema MAG(X), MAG(Y), MAG(Z)). Os eixos de medição dos sensores são orientados no sistema de coordenadas cartesianas à direita. A saída analógica dos sensores é conectada com conversor analógico-digital e ainda com bloco de filtros configurável. Os valores máximos possíveis de medição estão na faixa de 1,3 a 81. com resolução de 1/1055 .
O último bloco funcional contém termômetro que mede a temperatura no ambiente da IMU a fim de permitir a compensação da temperatura dos acelerômetros, giroscópios e magnetômetros de leitura.
Todos os blocos funcionais estão conectados com a unidade central de processamento marcada no esquema uProcessador. A fim de armazenar a memória adicional necessária para os parâmetros dos algoritmos foi adicionada (marcada no esquema como eeprom). A CPU realiza a filtragem antes que os dados sejam redirecionados para a saída CAN ou USB ou RS-232. A fim de estabelecer os parâmetros do algoritmo de filtragem, a fase de calibração é necessária.
| Sensores internos | acelerômetros, giroscópios, magnetômetros, sensor de temperatura | Gama de giroscópios | de ± 250 a 2000°/seg |
| Gama de acelerómetros | de ± 2 a ± 8 g | Saída digital | CAN, USB ou RS-232 |
>>
>>
Tabela 2.
Características internas da unidade de medida inercial apresentada.
O volume do sensor IMU apresentado é inferior a 2cm3 com caixa e pesa 3,13. Tal tamanho do sensor pode permitir que os projetistas de robôs possam passar de dispositivos de tamanho considerável para os projetos da microescala. O sensor de aceleração máxima é capaz de suportar 500 , enquanto a tensão de entrada é de 3,5 a 8V, e o consumo de corrente é de 35 mA. Existem três tipos diferentes de caixa que permitem a fixação do sensor em vários locais. A menor versão Micro (fig. 4) tamanho com montagem é 18,6 x 14,7 x 7,3 . Versão com os furos de montagem adicionais Versão com micro-montagem (fig. 5a) é 18,6 x 20,7 x 7,3 . As caixas da versão Micro e do cabo de saída da versão Micro-Mounting são indicadas com o conector USB ou RS-TTL, dependendo da versão. Há também uma versão ampliada com furos de montagem e um conector LEMO embutido na caixa (fig. 5b). Seu tamanho é 32,0 x 18,0 x 16,5 .
Medições físicas de todas as versões são apresentadas na tabela Tab.3.

Figure 4.
Os lados frontal e posterior da unidade de medição inercial.
As orientações dos eixos calibrados são gravadas e coloridas no lado superior, conforme apresentado na Fig. 5. O tamanho da montagem única é de 6,15 mm para a Versão de Micro Montagem, e 6,50 mm para a Versão Extendida LEMO.
Antes da aplicação da IMU nos objetos físicos foi feita uma comparação entre os menores sensores disponíveis no mercado, a fim de verificar a possibilidade de navegação de veículos móveis autônomos. Estudos comparativos foram desenhados para verificar os parâmetros de configuração do protótipo, analisar as causas dos erros de medição e verificar como os sensores, que realizaram testes, se comportam em situações extremas. Para os testes foram utilizados dois populares sensores comerciais em miniatura: MTiG-28G da XSens Technologies e Crista IMU da Microstrain (fig. 6b).
| IMU tipo | Dim. X | Dim. Y | Dim. Z | Unidades | Volume |
| Versão micro | 18.6 | 14.7 | 7,3 | mm | 1,996 cm3 |
| Versão Micro-Micro-Mount | 18.6 | 20,7 | 7,3 | mm | 2,811 cm3 |
| Versão ampliada | 32.0 | 16,5 | 18,0 | mm | 9,504 cm3 |
| Parâmetros comuns | Mín. | Tipo | Máx. | Unidades | |
| Peso (c/ alojamento) | – | 1.13 | – | grama | |
| Peso (c/ alojamento) | – | >3.13 | – | grama | |
| Temperatura de operação | -40 | – | >80 | °C | |
| Temperatura de armazenagem | -60 | – | 100 | °C | |
| Aceleração máxima | – | 500 | – | g | |
| Tensão de entrada | 3.5 | 5,0 | 6,0 | V | |
| Corrente | 30 | 35 | 40 | mA | |
>
Tabela 3.
Característica física do sensor.
>

Figure 5.
>
O esquema de montagem da micro IMU. a) Versão de micro-montagem, b) Versão LEMO extendida.

Figure 6.
A) Comparação do tamanho IMU apresentado com os produtos disponíveis no mercado, b) Plataforma de comparação IMU. A IMU apresentada é marcada pela elipse vermelha. No lado esquerdo da imagem da IMU Crista pode ser vista. Do outro lado pode-se ver o MtiG Imu da XSense Technologies.
A fim de realizar estudos comparativos a plataforma de calibração foi projetada, produzida e utilizada (fig. 6b). Todas as IMU’s testadas foram montadas na plataforma e seus dados brutos foram calibrados no sistema de coordenadas comum para todos os sensores usando o método de calibração apresentado. Foram realizados vários testes: a comparação de dados brutos, a comparação de dados filtrados, a estabilidade temporal dos sensores e a capacidade de compensação de temperatura. Na fig. 7a é apresentada a comparação das leituras dos acelerômetros do sensor IMU (CZK no gráfico) e do sensor MTiG (MTI no gráfico) e na fig. 7b é apresentada a comparação dos giroscópios. Ambas as comparações foram registradas durante o movimento.
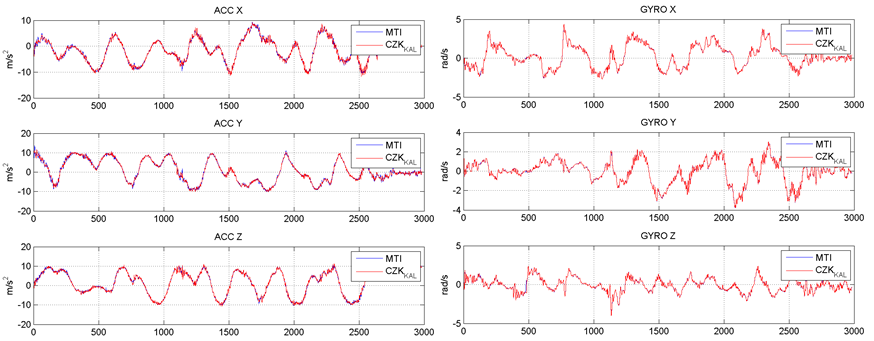
Figure 7.
Um gráfico de exemplo de estudos comparativos do sensor IMU apresentado e dos sensores disponíveis no mercado. O sensor IMU apresentado é rotulado como CZK e o sensor MTiG da XSens Technologies é rotulado como MTI. As unidades de tempo são . a) as leituras dos acelerômetros, b) as leituras dos giroscópios.
Notem-se que os dados de saída do sensor calibrado apresentado e o sensor de referência são quase os mesmos. Para medir as diferenças, estimamos o sinal a partir dos dados brutos e o separamos da componente de ruído. Apenas o giroscópio Y de medição foi escolhido como exemplo para apresentação. A escolha foi possível porque os resultados obtidos são comparáveis independentemente do eixo e do sensor (magnetómetros, acelerómetros ou giroscópios). Na parte direita da figura 8 é apresentado que o desvio padrão do ruído para o MTi-G28 e nosso sensor é de cerca de 0,04 enquanto o resultado da IMU Crista é de cerca de 0,12. A diferença entre o desvio padrão do MTi-G28 e o nosso sensor é de apenas 0,0035, o que geralmente é indistinguível a olho nu.
O coeficiente do sinal ao ruído é apresentado na tabela adicional. 4,
Um problema importante para as unidades de medição inercial é a estabilidade temporal dos dados de saída. Realizamos uma série de testes de estabilidade com duração de 4h. Os resultados apresentados na fig. 9 foram obtidos após a média de cinco amostras de cada IMU no teste. Duas observações principais podem ser feitas. Primeiro que o MTi-G28 e os nossos resultados da IMU são comparáveis. A diferença entre os valores médios obtidos é de apenas 0,00027 e a diferença entre os valores de desvio padrão é de 0,00226, que é ainda menor do que durante o teste com movimento. A segunda observação é que os resultados do nosso sensor e MTi-G28 estão mais de 20 vezes mais próximos do valor real 0.

Figure 8.
>
A comparação dos dados de saída durante o movimento do eixo Y dos giroscópios para os sensores testados (MTiG-28, Crista IMU e nosso sensor). As unidades de tempo são .
| Crista IMU (S/NKAL) | MTiG (S/NKAL) | IMU 5 (S/NKAL) | |
| Acelerómetros | 20,3 | 38,1 | 43,2 |
| Magnetómetros | N/A | 719,3 | 767,9 |
| Giroscópios | 13,6 | 206,7 | 254,5 |
Tabela 4.
A comparação do coeficiente do sinal com o ruído para as IMUs testadas. (Quanto maior o valor, melhor).
A disponibilidade global do GPS, a fiabilidade relativamente elevada das leituras e a não necessidade de infra-estruturas adicionais são as principais razões pelas quais a maioria dos sistemas de navegação inercial modernos utilizam GPS. O INS normalmente pode ser caracterizado por uma rápida taxa de atualização e pequenos mas sem limites de erros. O erro de GPS é limitado, porém o tempo de atualização é lento e a estimativa de atitude não é confiável. Devido à arquitetura fechada da maioria dos módulos GPS, o tipo de método mais popular de fusão é chamado de auxílio desacoplado ou acoplado frouxamente. O INS com GPS é usado nos sistemas de segurança do veículo para estimativa de um deslizamento lateral do veículo. O uso padrão envolve orientação e navegação do veículo. O sinal GPS requer uma clara visibilidade dos satélites, o que muitas vezes não é possível nos desfiladeiros, especialmente em ambientes urbanos de canyons. Os sistemas GPS/INS são frequentemente utilizados para a navegação de um quadrocopter ou orientação de mísseis.

Figure 9.
>
A comparação dos dados de saída durante o teste de estabilidade do eixo Y dos giroscópios para os sensores testados (MTiG-28, Crista IMU e nosso sensor). Cada valor no gráfico é um valor médio de 5 amostras do sensor.
Desenvolvemos um sistema de navegação inercial como uma solução completa de navegação embutida em uma única placa de circuito impresso. Ele contém uma unidade de medição inercial 10-DOF apresentada acima, acompanhada pelo módulo Global Positioning System (GPS). A fim de compensar a baixa precisão da estimativa da altitude do barômetro adicional GPS foi incorporado. O INS descrito permite medir ângulos em três dimensões, acelerações também em três dimensões, direção do sinal magnético mais forte e a temperatura do entorno. Ele utiliza a tecnologia MEMS para reduzir tanto o tamanho quanto o peso do sensor. A placa de circuito impresso INS com conector MCX pesa 3,67 gramas sem montagem e 8,86 gramas com a montagem padrão.
Dados de medição do sensor dependendo da versão podem ser enviados através do barramento USB ou CAN que são padrões típicos da indústria de transferência de dados. A flexibilidade é requerida dos sensores modernos a fim de integrá-lo com um sistema existente. Pela mesma razão, o sensor tem uma configuração de dados de saída flexível. A saída do sensor pode ser adquirida em três versões: como dados brutos do sensor, como dados após calibração e compensação de temperatura, ou como a saída do filtro de processamento. Os dados dos sensores também podem ser entregues ao usuário de várias formas. A primeira forma é a matriz de rotação, que é gerada com base nos dados do dispositivo. Os dados também podem ser fornecidos ao usuário final na forma de ângulos de Euler e seus valores dados em graus ou em radianos. O terceiro tipo de representação dos dados de saída é através da utilização de quaterniões. As coordenadas de posição de saída do GPS são enviadas no sistema de coordenadas ECEF (Earth Centrered Earth Fixed). A unidade da velocidade estimada pelo GPS é m/s. O altímetro de pressão atmosférica incorporado utilizado é caracterizado pela compensação interna da temperatura. Ele permite medir a pressão atmosférica na faixa de 20 a 110 kPa com resolução de 1,5 Pa. Ele pode ser usado para estimar a altitude do sensor com uma resolução igual a 30cm. A localização geográfica do sensor é calculada utilizando o módulo GPS. O GPS é ligado ao microprocessador através de um bus de comunicação série. A fim de melhorar a qualidade da estimativa das coordenadas é possível passar para as correcções diferenciais GPS (DGPS). A saída do GPS é no sistema de coordenadas ECEF (Earth Centrered Earth Fixed) e a frequência é de 10 Hz.
O volume do sensor INS apresentado é inferior a 4cm3 com caixa e pesa 8,86 . Tal tamanho do sensor pode permitir que os projetistas de robôs passem de dispositivos de tamanho considerável para os projetos da microescala. O sensor de aceleração máxima é capaz de suportar 500 , enquanto a tensão de entrada é de 3,5 a 8V, e o consumo de corrente é de 50 mA. Existem dois tipos diferentes de caixa que permitem a fixação do sensor em vários locais. A menor versão Micro (fig. 10) tamanho com montagem é 32,7 x 14,9 x 8,0 . A versão com o conector MCX (fig. 3b) é 32,7 x 14,9 x 12,1 . O volume da versão estendida é inferior a 6cm3 . O sensor pode operar em uma ampla faixa de temperaturas começando de -40°C a 80°C.
Medições físicas de todas as versões são apresentadas na tabela 5..

Figure 10.
O lado frontal (a) e o lado posterior (b) do sistema de navegação por inércia PCB com conector MCX.
| INS tipo | Dim. X | Dim. Y | Dim. Z | Unidades | Volume | |
| Versão micro | 32.7 | 14.9 | 8.0 | mm | 3,897 cm3 | |
| Versão ampliada | 32,7 | 14.9 | 12.1 | mm | 5.895 cm3 | |
| Parâmetros comuns | Mín. | Tipo | Máx. | Unidades | ||
| Peso (sem caixa) | – | 3.67 | – | grama | ||
| Peso (c/ alojamento) | – | 8.86 | – | grama | ||
| Temperatura de operação | -40 | – | – | 80 | °C | |
| Temperatura de armazenagem | -60 | – | 100 | °C | ||
| Aceleração máxima | – | 500 | – | g | ||
| Tensão de entrada | 3.5 | 5,0 | 6,0 | V | ||
| Corrente | 40 | 50 | 60 | mA | ||
>
Tabela 5.
Característica física do sensor.
Os eixos calibrados são gravados e coloridos na parte superior, conforme apresentado na Fig. 11.

Figure 11.
O esquema de montagem do INS. a) Versão de micro-montagem, b) Versão estendida.
O INS introduzido foi comparado com a menor IMU com um volume abaixo de 2 . Tanto os eixos de medição como o tamanho estão marcados na figura 12ab. A dimensão X do micro IMU 5 é 18,6 que é cerca de 57% do tamanho do INS. A dimensão Y é 14,7 que é cerca de 99% do tamanho INS e a dimensão Z da IMU é mais baixa que 91% da versão Micro do INS e 60% da versão Extendida. No entanto, a versão Extended LEMO do IMU é 18, o que corresponde a 225% da versão Micro do INS. A comparação baseada apenas no volume permite afirmar que a versão micro do INS é menos de duas vezes maior (195% da versão micro do IMU).

Figure 12.
A comparação do INS proposto (b) com o IMU mais pequeno do mundo (a). Os eixos de medição são desenhados na imagem. c) A comparação do tamanho da montagem do INS e IMU apresentados, d) A comparação das características externas do INS proposto e do IMU.