Os vários tipos de controladores são utilizados para melhorar o desempenho dos sistemas de controlo. Neste capítulo, discutiremos os controladores básicos como o proporcional, o derivado e o integral.
Controlador proporcional
O controlador proporcional produz uma saída, que é proporcional ao sinal de erro.
$$u(t) \propto e(t) $$
$$$\ Seta direita u(t)=K_P e(t)$$
Aplique a transformada Laplace em ambos os lados –
$$$U(s)=K_P E(s)$$
$$$$frac{U(s)}{E(s)}=K_P$$$$
Portanto, a função de transferência do controlador proporcional é $K_P$.
Onde,
U(s) é a transformada Laplace do sinal de acionamento u(t)
E(s) é a transformada Laplace do sinal de erro e(t)
KP é a constante de proporcionalidade
O diagrama de blocos do sistema de controle de malha fechada de realimentação negativa unitária junto com o controlador proporcional é mostrado na figura a seguir.

O controlador proporcional é usado para alterar a resposta transiente conforme o requerimento.
Controlador Derivado
O controlador derivado produz uma saída, que é derivada do sinal de erro.
$$u(t)=K_D \frac{\text{d}e(t)}{\text{d}t}$$
Aplique a transformada Laplace em ambos os lados.
$$$U(s)=K_D sE(s)$$
$$$$frac{U(s)}{E(s)}=K_D s$$$
Então, a função de transferência do controlador derivado é $K_D s$.
Onde, $K_D$ é a constante derivada.
O diagrama de blocos do sistema de controle de circuito fechado de feedback negativo unitário junto com o controlador de derivada é mostrado na figura a seguir.
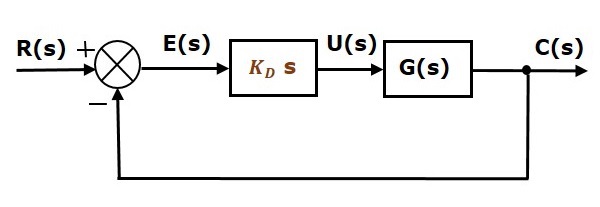
O controlador derivado é usado para fazer o sistema de controle instável em um estável.
Controlador Integral
O controlador integral produz uma saída, que é integral do sinal de erro.
$$u(t)=K_I \int e(t) dt$$
Aplique a transformada Laplace em ambos os lados –
$$U(s)=\frac{K_I E(s)}{s}$$$
$$$frac{U(s)}{E(s)}=\frac{K_I}{s}$$$
Portanto, a função de transferência do controlador integral é $\frac{K_I}{s}$.
Onde, $K_I$ é a constante integral.
O diagrama de blocos do sistema de controle de circuito fechado de feedback negativo unitário junto com o controlador integral é mostrado na figura seguinte.
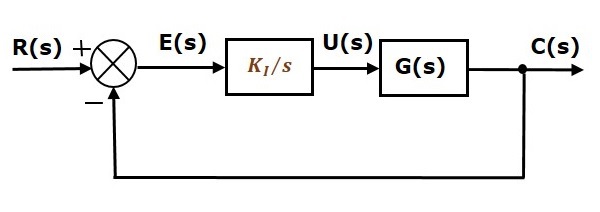
O controlador integral é usado para diminuir o erro de estado estacionário.
Deixe-nos agora discutir sobre a combinação de controladores básicos.
Controlador de derivada proporcional (PD)
O controlador de derivada proporcional produz uma saída, que é a combinação das saídas dos controladores proporcional e derivada.
$$u(t)=K_P e(t)+K_D \frac{\text{d}e(t)}{\text{d}t}$$$
Aplique a transformada Laplace em ambos os lados –
$$$U(s)=(K_P+K_D s)E(s)$$
$$$$frac{U(s)}{E(s)}=K_P+K_D s$$$
Portanto, a função de transferência do controlador de derivativos proporcional é $K_P + K_D s$.
O diagrama de blocos do sistema de controle de circuito fechado de feedback negativo unitário juntamente com o controlador de derivada proporcional é mostrado na figura a seguir.
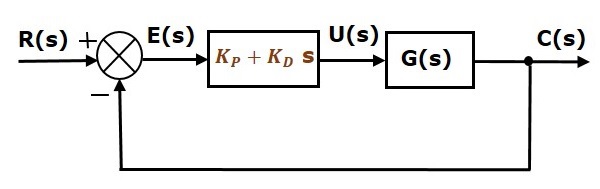
O controlador de derivada proporcional é usado para melhorar a estabilidade do sistema de controle sem afetar o erro de estado estacionário.
Controlador integral proporcional (PI)
O controlador integral proporcional produz uma saída, que é a combinação das saídas dos controladores proporcional e integral.
$$u(t)=K_P e(t)+K_I \int e(t) dt$$
Aplicar a transformada Laplace em ambos os lados –
$$$U(s)==esquerda(K_P+\frac{K_I}{s} {s} {s} E(s)$$
$$$frac{U(s)}{E(s)}=K_P+\frac{K_I}{s}$$
Por isso, a função de transferência do controlador integral proporcional é $K_P + \frac{K_I} {s}$.
O diagrama de blocos do sistema de controle de malha fechada de realimentação negativa unitária juntamente com o controlador integral proporcional é mostrado na figura a seguir.
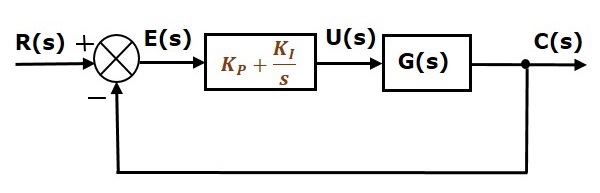
O controlador integral proporcional é usado para diminuir o erro de estado estacionário sem afetar a estabilidade do sistema de controle.
Controlador Integral Derivado proporcional (PID)
O controlador integral proporcional derivativo produz uma saída, que é a combinação das saídas dos controladores proporcional, integral e derivada.
$$u(t)=K_P e(t)+K_I \int e(t) dt+K_D \frac{\text{d}e(t)}{\text{d}t}$$$
Aplique a transformada Laplace em ambos os lados –
$$$U(s)==esquerda(K_P+\frac{K_I}{s}+K_D s \direita )E(s)$$
$$$$frac{U(s)}{E(s)}=K_P+\frac{K_I}{s}+K_D s$$$
Então, a função de transferência do controlador de derivada integral proporcional é $K_P + \frac{K_I} {s} + K_D s$.
O diagrama de blocos do sistema de controle de malha fechada de realimentação negativa unitária juntamente com o controlador de derivada integral proporcional é mostrado na figura seguinte.
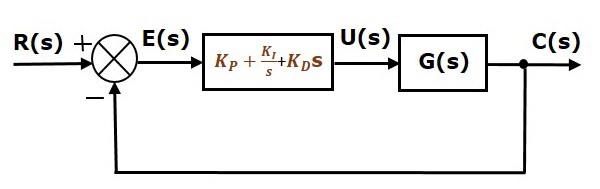
O controlador de derivada integral proporcional é usado para melhorar a estabilidade do sistema de controle e diminuir o erro de estado estacionário.