Sensoren miniaturisatie
De noodzaak van toenemende miniaturisatie van elektronische apparaten om ze te kunnen gebruiken in alledaagse gereedschappen, miniatuurrobots en UAV’s zal naar verwachting nog een paar jaar ophouden alvorens verder te springen van apparaten met micro- tot nano-afmetingen. Daarom moeten de momenteel op de markt verkrijgbare traagheidsmeeteenheden worden herzien. Er zijn verschillende commerciële traagheidsmeeteenheden op de markt. Bijvoorbeeld 3DM-GX 1 van MicroStrain, MTi-G van Xsens Technologies, Crista IMU van Cloud Cap Technology, μNAV van Crossbow Technology, AHRS200AV2.5 van Rotomotion en ADIS 16400/405 van Analog Devices. Om de mogelijkheden van de genoemde oplossingen te verifiëren, hebben wij de kenmerken ervan vergeleken met de huidige stand van de techniek miniatuur MEMS IMU 5, ontwikkeld door de auteurs van de tekst. De vergelijking is zichtbaar in het tabblad. 1.
De huidige state of the art IMU 5 10-DOF maakt het mogelijk hoeken in drie dimensies te meten, versnellingen ook in drie dimensies, de richting van het sterkste magneetsignaal en de temperatuur van de omgeving. Hij maakt gebruik van MEMS-technologie om zowel de afmetingen als het gewicht van de sensor te beperken. De sensor weegt slechts 1,13 zonder montage en 3,13 met de standaard montage.
Metingsgegevens van de IMU 5 sensor, afhankelijk van de versie, kunnen worden verzonden via de USB of CAN bus of RS-232, wat typische industriestandaarden zijn voor gegevensoverdracht. De flexibiliteit is vereist van moderne sensoren om ze te kunnen integreren in bestaande systemen. Om dezelfde reden heeft de sensor een flexibele configuratie van de uitgangsgegevens. De uitgang van de sensor kan in drie versies worden verkregen: als ruwe sensorgegevens, als gegevens na ijking en temperatuurcompensatie, of als de uitgang van een verwerkingsfilter. De gegevens van de sensoren kunnen ook in verschillende vormen aan de gebruiker worden geleverd. De eerste vorm is de rotatiematrix, die wordt gegenereerd op basis van gegevens van het apparaat. Gegevens kunnen ook aan de eindgebruiker worden geleverd in de vorm van Euler-hoeken en hun waarden uitgedrukt in graden of in radialen. Het derde type weergave van de uitvoergegevens geschiedt met behulp van quaternionen.
Het schema van de werking van de micromeeteenheid is weergegeven in fig. 3 en de interne kenmerken in tab.
Een van de fundamentele traagheidssensoren is de gyroscoop die de hoeksnelheid Ω meet (in het schema GYRO(X), GYRO(Y), GYRO(Z)). Deze sensoren zijn zo georiënteerd dat hun meetassen een rechtshandig cartesisch coördinatenstelsel creëren. De uitgang van analoge MEMS-signalen wordt gefilterd door een instelbaar laagdoorlaatfilter (12,5, 25, 50, 110 Hz). Na filtratie wordt het signaal omgezet in digitale vorm door een analoog-digitaal omzetter met een resolutie van 16 bit. Het digitale signaal kan verder worden gefilterd door configureerbare laag- en hoogdoorlaatfilters. De frequentie van de gegevens van de gyroscopen kan worden ingesteld op 100, 200, 400 of 800 Hz. De resolutie van de metingen kan worden geconfigureerd met een aangepaste precisie in het bereik van 250 °/s tot 2000 °/s.
Een ander belangrijk element in het schema is het lineaire versnellingen sensoren blok (in het schema ACC(X), ACC(Y), ACC(Z)). De sensoren werden zodanig georiënteerd dat de meetassen ook rechtshandig Cartesisch coördinatenstelsel creëren. Analoge signalen van de sensoren MEMS output werden omgeleid naar het filter en verder naar de analoog-digitaal omzetter. De maximale resolutie van de gemeten versnellingen kan worden ingesteld op ±2/±4/±8 (g ≇9,81m/s2). De gevoeligheid van de versnellingsmeters werd gemeten als 1 .
| Producent | MicroStrain | Xsens Technologies | Cloud Cap Technology |
| Model | 3DM-GX1 | MTi-G | Crista IMU |
| Interne sensoren | versnellingsmeters, gyroscopen, magnetometers, temperatuursensor | accelerometers, magnetometers, gyroscopen, GPS | accelerometers, gyroscopen, temperatuursensor |
| Gyroscopen bereik | ± 300°/sec | ± 300°/sec | ± 300°/sec |
| Accelerometers bereik | ± 5 g | ± 5 g | ± 10 g |
| Digitale uitgang | RS-232, RS-485 | RS-232, USB | RS-232, CAN |
| Temperatuurbereik | -40°C tot +70°C | -20°C tot +60°C | -40°C tot +70°C |
| Afmeting met montage | 64x90x25 | 58x58x33 | 52.07×38.8×25.04 |
| Gewicht | 75 | 68 | 38.6 |
| Producent | Crossbow Technology | Analog Devices | Rotomotion |
| Model | μNAV | ADIS 16400/405 | AHRS200AV2.5 |
| Interne sensoren | versnellingsmeters, gyroscopen, magnetometers, temperatuursensor, GPS | versnellingsmeters, magnetometers, gyroscopen, temperatuursensor | versnellingsmeters, gyroscopen, magnetometers |
| Gyroscopen bereik | ± 150°/sec | ± 75-300°/sec | ± 90°/sec |
| Accelerometers bereik | ± 2 g | ± 18 g | ± 2 g |
| Digitale uitgang | RS-232 | SPI | RS-232, Ethernet |
| Temperatuurbereik | -5°C tot +45°C | -40°C tot +85°C | -5°C tot +75°C |
| Afmeting met montage | 57x45x11 | 31.9×23,5×22,9 | “/>100x100x100 |
| Gewicht | 33 | 16 | “/>100 |
Tabel 1.
Vergelijking van de momenteel op de markt verkrijgbare miniatuur traagheidsmeeteenheden.

Figuur 3.
Het IMU-schema van werking.
Het volgende functieblok meet het aardmagnetisch veld met magnetometers (in het schema MAG(X), MAG(Y), MAG(Z)). De meetassen van de sensoren zijn georiënteerd in het rechtshandige cartesiaanse coördinatensysteem. De analoge uitgang van de sensoren is verbonden met een analoog-digitaal omzetter en verder met een configureerbaar filterblok. De maximaal te meten waarden liggen in het bereik van 1.3 tot 81. met een resolutie van 1/1055.
Het laatste functionele blok bevat een thermometer die de temperatuur in de omgeving van de IMU meet om temperatuurcompensatie van de aflezingen van de versnellingsmeters, gyroscopen en magnetometers mogelijk te maken.
Alle functionele blokken zijn verbonden met de centrale verwerkingseenheid die is aangegeven in het schema uProcessor. Voor de opslag van de voor de algoritmen benodigde parameters werd extra geheugen toegevoegd (in het schema aangeduid als eeprom). De CPU voert de filtering uit voordat de gegevens worden doorgestuurd naar de CAN of USB of RS-232 uitgang. Om de parameters van het filteralgoritme vast te stellen is de kalibratiefase nodig.
| Interne sensoren | versnellingsmeters, gyroscopen, magnetometers, temperatuursensor | Gyroscopen bereik | van ± 250 tot 2000°/sec |
| Accelerometers bereik | van ± 2 tot ± 8 g | Digitale uitgang | CAN, USB of RS-232 |
Tabel 2.
Interne kenmerken van de gepresenteerde traagheidsmeeteenheid.
Het volume van de gepresenteerde IMU-sensor is minder dan 2 cm3 met behuizing en weegt 3,13. Een dergelijke grootte van de sensor kan ontwerpers van robots in staat stellen om van apparaten van aanzienlijke grootte over te stappen op ontwerpen van de microschaal. De sensor is bestand tegen een maximale versnelling van 500 V, terwijl de ingangsspanning 3,5 tot 8 V bedraagt en de stroomopname 35 mA. Er zijn drie verschillende types van de behuizing die het mogelijk maken de sensor op verschillende plaatsen te bevestigen. De kleinste uitvoering Micro (fig. 4) heeft een afmeting van 18,6 x 14,7 x 7,3 . De versie met de extra montagegaten Micro-versie (fig. 5a) is 18,6 x 20,7 x 7,3 . De uitgangskabel van de behuizingen van de Micro-versie en Micro-Mounting versie is voorzien van de USB of RS-TTL connector, afhankelijk van de versie. Er is ook een uitgebreide versie met montagegaten en een LEMO-stekker in de behuizing (fig. 5b). De afmetingen zijn 32,0 x 18,0 x 16,5 .
Fysische afmetingen van alle versies zijn weergegeven in Tab.3.

Figuur 4.
De voor- en achterkant van de traagheidsmeeteenheid.
Gekalibreerde asoriëntaties zijn gegraveerd en gekleurd op de bovenzijde, zoals te zien is in fig. 5.
Voor de toepassing van de IMU in fysische objecten werd een vergelijking gemaakt tussen de kleinste op de markt verkrijgbare sensoren om de mogelijkheid van navigatie van autonome mobiele voertuigen te verifiëren. Vergelijkende studies waren bedoeld om de parameters van het prototype te controleren, de oorzaken van meetfouten te analyseren en na te gaan hoe de sensoren, die tests uitvoerden, zich in extreme situaties gedragen. Voor de tests werden twee populaire commerciële miniatuursensoren gebruikt: MTiG-28G van XSens Technologies en Crista IMU van Microstrain (fig. 6b).
| IMU type | Dim. X | Dim. Y | Dim. Z | Eenheden | Volume | ||
| Micro-versie | 18.6 | 14.7 | 7,3 | mm | 1,996 cm3 | ||
| Micro-uitvoering | 18.6 | 20,7 | 7,3 | mm | 2,811 cm3 | ||
| Uitgebreide uitvoering | 32.0 | 16,5 | 18,0 | mm | 9,504 cm3 | ||
| Common parameters | Min. | Type | Max. | Eenheden | |||
| Gewicht (zonder behuizing) | – | 1,13 | – | gram | |||
| Gewicht (met behuizing) | – | 3,13 | – | .13 | – | gram | |
| Bedrijfstemperatuur | -40 | – | 80 | °C | |||
| Opslagtemperatuur | -60 | – | 100 | °C | |||
| Maximale versnelling | – | 500 | – | g | |||
| Invoerspanning | 3.5 | 5.0 | 6.0 | V | |||
| Stroom | 30 | 35 | 40 | mA | |||
Tabel 3.
Fysische karakteristiek van de sensor.

Figuur 5.
Het montageschema van de micro-IMU. a) Micro-Mounting versie, b) Extended LEMO versie.

Figuur 6.
A) Vergelijking van de afmetingen van de gepresenteerde IMU met de op de markt verkrijgbare producten, b) Vergelijkingsplatform voor IMU’s. De gepresenteerde IMU is gemarkeerd door de rode ellips. Links in het beeld is de Crista IMU te zien. Aan de andere kant is de MtiG Imu van XSense Technologies te zien.
Om vergelijkende studies te kunnen uitvoeren werd een kalibratieplatform ontworpen, geproduceerd en gebruikt (fig. 6b). Alle geteste IMU’s werden op het platform gemonteerd en hun ruwe gegevens werden gekalibreerd naar het gemeenschappelijke coördinatensysteem voor alle sensoren met behulp van de gepresenteerde kalibratiemethode. Verschillende tests werden uitgevoerd: vergelijking van de ruwe gegevens, vergelijking van de gefilterde gegevens, tijdstabiliteit van de sensoren en mogelijkheid tot temperatuurcompensatie. In fig. 7a is een vergelijking te zien van de metingen van de versnellingsmeters van de voorgestelde IMU-sensor (CZK in de grafiek) en de MTiG-sensor (MTI in de grafiek) en in fig. 7b is de vergelijking van de gyroscopen te zien. Beide vergelijkingen zijn opgenomen tijdens beweging.
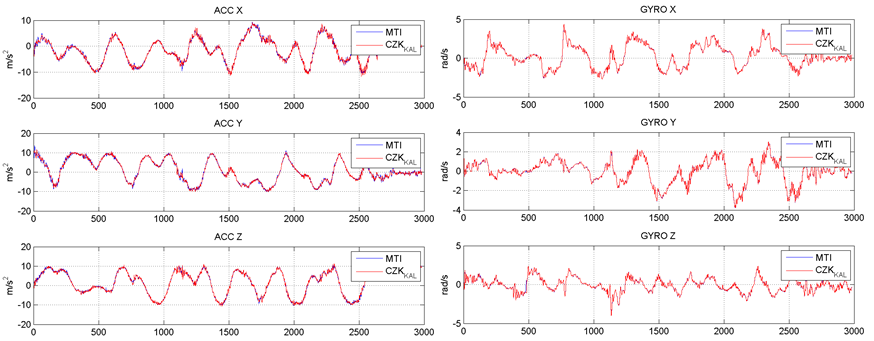
Figuur 7.
Een voorbeeldgrafiek van vergelijkende studies van de gepresenteerde IMU-sensor en de sensoren die op de markt verkrijgbaar zijn. De voorgestelde IMU-sensor wordt aangeduid met CZK en de MTiG-sensor van XSens Technologies wordt aangeduid met MTI. Tijdseenheden zijn . a) de aflezingen van de versnellingsmeters, b) de aflezingen van de gyroscopen.
Het valt op dat de uitvoergegevens van de gepresenteerde gekalibreerde sensor en de referentiesensor vrijwel gelijk zijn. Om de verschillen te meten hebben wij het signaal geschat uit de ruwe gegevens en gescheiden van de ruiscomponent. Alleen gyroscoop Y-meetas werd als voorbeeld gekozen voor de presentatie. Deze keuze was mogelijk omdat de resultaten vergelijkbaar zijn, ongeacht de as en de sensor (magnetometer, versnellingsmeter of gyroscoop). In het rechterdeel van fig. 8 is te zien dat de standaardafwijking van de ruis voor MTi-G28 en onze sensor ongeveer 0,04 bedraagt, terwijl het resultaat van de Crista IMU ongeveer 0,12 bedraagt. Het verschil tussen de standaardafwijking van de MTi-G28 en onze sensor is slechts 0,0035, wat gewoonlijk niet met het menselijk oog te onderscheiden is.
Een aanvullende tabel met de signaal-ruiscoëfficiënt is te vinden in tab.
Een belangrijk probleem voor traagheidsmeeteenheden is de tijdstabiliteit van de uitgangsgegevens. Wij hebben een reeks stabiliteitstests uitgevoerd met een duur van 4 uur. De in fig. 9 gepresenteerde resultaten zijn verkregen na middeling van vijf samples van elke IMU in de test. Twee belangrijke waarnemingen kunnen worden gedaan. Ten eerste zijn de resultaten van de MTi-G28 en onze IMU vergelijkbaar. Het verschil tussen de bereikte gemiddelde waarden is slechts 0,00027 en het verschil tussen de standaardafwijkingswaarden is 0,00226, wat nog lager is dan tijdens de test met beweging. De tweede waarneming is dat onze sensor- en MTi-G28-resultaten meer dan 20 keer dichter bij de werkelijke 0-waarde liggen.

Figuur 8.
Vergelijking van de uitvoergegevens tijdens de beweging van de Y-as van de gyroscopen voor de geteste sensoren (MTiG-28, Crista IMU en onze sensor). Tijdseenheden zijn .
| Crista IMU (S/NKAL) | MTiG (S/ NKAL) | IMU 5 (S/NKAL) | |
| Accelerometers | 20,3 | 38,1 | 43,2 |
| Magnetometers | N/A | 719,3 | 767,9 |
| Gyroscopen | 13,6 | 206,7 | 254,5 |
Tabel 4.
De vergelijking van signaal-ruiscoëfficiënt voor de geteste IMU’s. (Hoe groter de waarde, hoe beter).
De wereldwijde beschikbaarheid van GPS, de relatief hoge betrouwbaarheid van de aflezingen en het feit dat geen extra infrastructuur nodig is, zijn de belangrijkste redenen dat de meeste moderne traagheidsnavigatiesystemen GPS gebruiken. De INS worden gekenmerkt door een snelle updatefrequentie en een kleine maar onbegrensde fout. De GPS-fout is begrensd, maar de updatetijd is traag en de positiebepaling is niet betrouwbaar. Wegens de gesloten architectuur van de meeste GPS-modules wordt de meest populaire fusiewijze ontkoppelde of losjes gekoppelde hulp genoemd. INS met GPS wordt gebruikt in veiligheidssystemen voor voertuigen om de zijslip van een voertuig in te schatten. Het standaardgebruik betreft voertuiggeleiding en navigatie. GPS-signalen vereisen een duidelijk zicht op de satellieten, hetgeen vaak niet mogelijk is in ravijnen, vooral in stedelijke ravijnomgevingen. De GPS/INS-systemen worden vaak gebruikt voor navigatie van een quadrocopter of raketgeleiding.

Figuur 9.
De vergelijking van de uitvoergegevens tijdens de stabiliteitstest van de Y-as van de gyroscopen voor de geteste sensoren (MTiG-28, Crista IMU en onze sensor). Elke waarde in de grafiek is een gemiddelde waarde van 5 samples van de sensor.
Wij hebben een traagheidsnavigatiesysteem ontwikkeld als een complete navigatieoplossing ingebed in één enkele PCB. Het bevat de hierboven gepresenteerde 10-DOF traagheidsmeeteenheid, vergezeld van een Global Positioning System (GPS)-module. Ter compensatie van de lage precisie van de hoogteschatting van de GPS werd een extra barometer ingebouwd. Met de beschreven INS kunnen hoeken in drie dimensies, versnellingen eveneens in drie dimensies, de richting van het sterkste magneetsignaal en de temperatuur van de omgeving worden gemeten. Er wordt gebruik gemaakt van MEMS-technologie om zowel de afmetingen als het gewicht van de sensor te beperken. De INS printplaat met MCX connector weegt 3,67 gram zonder montage en 8,86 gram met de standaard montage.
Metingsgegevens van de sensor, afhankelijk van de versie, kunnen worden verzonden via de USB of CAN bus, wat typische industriestandaarden zijn voor gegevensoverdracht. De flexibiliteit is vereist van moderne sensoren om het te integreren in een bestaand systeem. Om dezelfde reden heeft de sensor een flexibele configuratie van de uitgangsgegevens. De uitgang van de sensor kan in drie versies worden verkregen: als ruwe sensorgegevens, als gegevens na ijking en temperatuurcompensatie, of als de uitgang van een verwerkingsfilter. De gegevens van de sensoren kunnen ook in verschillende vormen aan de gebruiker worden geleverd. De eerste vorm is de rotatiematrix, die wordt gegenereerd op basis van gegevens van het apparaat. Gegevens kunnen ook aan de eindgebruiker worden geleverd in de vorm van Euler-hoeken en hun waarden uitgedrukt in graden of in radialen. Het derde type weergave van de uitvoergegevens is met behulp van quaternionen. De output-positiecoördinaten van het GPS worden verzonden in het coördinatensysteem ECEF (Earth Centered Earth Fixed). De eenheid van de door de GPS geschatte snelheid is m/s. De gebruikte geïntegreerde atmosferische drukhoogtemeter wordt gekenmerkt door interne temperatuurcompensatie. Hiermee kan de atmosferische druk worden gemeten in het bereik van 20 tot 110 kPa met een resolutie van 1,5 Pa. Met deze hoogtemeter kan de hoogte van de sensor worden geschat met een resolutie gelijk aan 30 cm. De geografische plaatsbepaling van de sensor wordt berekend met behulp van de GPS-module. De GPS is met de microprocessor verbonden via een seriële communicatiebus. Om de kwaliteit van de coordinatenschatting te verbeteren is het mogelijk de GPS differentiële correcties (DGPS) te laten uitvoeren. De output van de GPS is in het Aarde Gecentreerd Aarde Vast (ECEF) coördinatensysteem en de frequentie is 10 Hz.
Het volume van de gepresenteerde INS sensor is minder dan 4cm3 met behuizing en weegt 8,86 . Een dergelijke grootte van de sensor kan ontwerpers van robots in staat stellen om van apparaten van aanzienlijke grootte over te gaan naar ontwerpen van de microschaal. De sensor is bestand tegen een maximale versnelling van 500 V, terwijl de ingangsspanning 3,5 tot 8 V bedraagt en de stroomopname 50 mA. Er zijn twee verschillende types van de behuizing die het mogelijk maken de sensor op verschillende plaatsen te bevestigen. De kleinste uitvoering Micro (fig. 10) heeft een afmeting van 32,7 x 14,9 x 8,0 . De versie met de MCX-connector (fig. 3b) is 32,7 x 14,9 x 12,1 . Het volume van de verlengde versie is minder dan 6cm3. De sensor kan werken in een breed temperatuurbereik van -40°C tot 80°C.
Fysische metingen van alle versies zijn weergegeven in Tab.5

Figuur 10.
De voorzijde (a) en achterzijde (b) van de PCB van het traagheidsnavigatiesysteem met MCX-connector.
| INS type | Dim. X | Dim. Y | Dim. Z | Eenheden | Volume |
| Micro-versie | 32.7 | 14.9 | 8.0 | mm | 3,897 cm3 |
| Uitgebreide versie | 32,7 | 14.9 | 12.1 | mm | 5.895 cm3 |
| Common parameters | Min. | Type | Max. | Eenheden | |
| Gewicht (zonder behuizing) | – | 3.67 | – | gram | |
| Gewicht (met behuizing) | – | 8.86 | – | gram | |
| Bedrijfstemperatuur | -40 | – | 80 | °C | |
| Opslagtemperatuur | -60 | – | 100 | °C | |
| Maximale versnelling | – | 500 | – | g | |
| Invoerspanning | 3.5 | 5.0 | 6.0 | V | |
| Stroom | 40 | 50 | 60 | mA | |
Tabel 5.
Fysische karakteristieken van de sensor.
Gekalibreerde asoriëntaties zijn gegraveerd en gekleurd op de bovenzijde zoals weergegeven in Fig. 11.

Figuur 11.
Het INS-montageschema. a) Micro-Mounting versie, b) Extended versie.
De ingevoerde INS werd vergeleken met de kleinste IMU met een volume kleiner dan 2 . De assen voor meting en afmetingen zijn aangegeven in fig. 12ab. De X-afmeting van de micro-IMU 5 is 18,6 wat ongeveer 57% is van de INS-afmeting. De Y-afmeting is 14,7 wat ongeveer 99% is van de INS-afmeting en de Z-afmeting van de IMU is min of meer gelijk aan 91% van de micro-versie van de INS en 60% van de uitgebreide versie. De uitgebreide LEMO-versie van de IMU is echter 18 en dat is 225% van de micro-versie van de INS. Vergelijking op basis van het volume laat alleen de stelling toe dat de micro-versie van de INS minder dan twee keer zo groot is (195% van de micro-versie van de IMU).

Figuur 12.
De vergelijking van de voorgestelde INS (b) met ’s werelds kleinste IMU (a). De meetassen zijn in de afbeelding getekend. c) De vergelijking van de montagegrootte van de voorgestelde INS en IMU, d) De vergelijking van de uiterlijke kenmerken van de voorgestelde INS en de IMU.