- センサの小型化
- Table 1.をご参照ください。
- Figure 3.
- Table 2.のように、デジタルで表示できます。
- Figure 4.
- テーブル3.0 5.5 6.5 5.0 5.0 V Physical characteristic of the sensor. Figure 5.センサーの物理的特性。 Figure 6. A)市場で入手できる製品に対する提示IMUサイズの比較、b)IMU比較のプラットフォームです。 提示されたIMUは赤い楕円で示されています。 画像の左側には、Crista IMUが見えます。 5663>
- Figure 7.
- Figure 8.
- テーブル4.
- 図9.
- Figure 10.
- 表5.
- Figure 11.
- Figure 12.
センサの小型化
日用品や小型ロボット、UAVに使用するために電子機器の小型化が進んでいるが、マイクロからナノサイズへのジャンプは数年先になると予想される。 そのため、現在市販されている慣性計測ユニットを見直す必要がある。 市販の慣性計測ユニットは複数存在する。 例えば、MicroStrain社の3DM-GX 1、Xsens Technologies社のMTi-G、Cloud Cap Technology社のCrista IMU、Crossbow Technology社のμNAV、Rotomotion社のAHRS200AV2.5、Analog Devices社のADIS 16400/405などである。 これらのソリューションの能力を検証するために、その特性を、本文の執筆者が開発した最新の小型MEMS IMU 5と比較しました。 この比較は、タブで見ることができます。 1.
最先端のIMU 5 10-DOFは、3次元の角度、同じく3次元の加速度、最も強い磁石信号の方向、周囲の温度を測定することができます。 また、MEMS技術を活用し、センサーの小型化・軽量化を実現しました。
IMU5センサーの測定データは、バージョンに応じて、USB、CANバス、RS-232といった業界標準のデータ転送方式で送信することが可能です。 既存のシステムに統合するために、最新のセンサーには柔軟性が求められます。 同じ理由で、このセンサーは柔軟な出力データ構成を持っています。 センサーの出力は、生のセンサーデータ、校正と温度補正後のデータ、処理フィルタの出力という3つのバージョンで取得することができます。 また、センサーからのデータは、様々な形でユーザーに提供されることがあります。 最初の形態は、デバイスからのデータに基づいて生成される回転マトリックスである。 また、データはオイラー角の形でエンドユーザーに提供され、その値は度またはラジアン単位で与えられます。 第3の出力データ表現は、クォータニオンを使用することである。
マイクロ測定ユニットの動作のスキームを図3に、内部特性をタブに示した。
基本的な慣性センサの1つに角速度ω(スキーマではGYRO(X), GYRO(Y), GYRO(Z))を計測するジャイロセンサがある。 これらのセンサーは、測定軸が右手直交座標系を作成するように配置されている。 アナログのMEMS型信号出力は、設定可能なローパスフィルタ(12.5、25、50、110Hz)でフィルタリングされる。 フィルタリング後の信号は、16ビット分解能のアナログ-デジタル変換器でデジタル形式に変換されます。 デジタル信号は、設定可能なローパスフィルタとハイパスフィルタによって、さらにフィルタリングすることができます。 ジャイロスコープからのデータの周波数は、100、200、400、800 Hzに設定可能です。 測定値の分解能は、250 °/s から 2000 °/s の範囲で修正された精度で設定できます。
スキーマのもう 1 つの重要な要素は、線形加速度センサー ブロック (スキーマでは ACC(X), ACC(Y), ACC(Z))です。 センサーは、測定軸が右手直交座標系を作成するように方向付けられました。 センサーのMEMS出力からのアナログ信号はフィルターに送られ、さらにアナログ-デジタルコンバーターに送られた。 測定された加速度の最大分解能は±2/±4/±8 (g ≇9.81m/s2) に設定される. 加速度センサーの感度は、1 .
| Producer | MicroStrain | Xsens Technologies | Cloud Cap テクノロジー | |||||
| 3DM-。GX1 | MTi-G | Crista IMU | ||||||
| 内蔵センサー | 加速度計。 ジャイロスコープ、地磁気センサ、温度センサ | accelerometer, magnetometers, gyroscopes, GPS | ||||||
| ジャイロスコープ範囲 | ± 300°/sec | ± 300°/sec | ± 300°/sec | |||||
| 加速度センサ範囲 | ± 5 g | ± 10 g | ||||||
| デジタル出力 | RS-> | ± 5 g | ± 5 g | ± 5 g | ± 5 g | RS-232, USB | RS-232, CAN | |
| 温度範囲 | -40℃~+70℃ | -20℃~+60℃ | -40℃~+70℃ | |||||
| 取り付け時サイズ | 64x90x25 | 58x58x33 | ||||||
| Weight | 75 | 68 | 35.0 | 38.6 | ||||
| プロデューサー | Crossbow Technology | Analog Devices | Rotomotion | |||||
| 機種 | μNAV | ADIS 16400/405 | AHRS200AV2.5 | |||||
| 内部センサー | 加速度計、ジャイロスコープ、磁力計、温度センサー、GPS | 加速度計、ジャイロスコープ、温度センサー | accelerometers, gyroscopes, 磁力計 | |||||
| ジャイロスコープ範囲 | ± 150°/sec | ± 75-…300°/秒 | ± 90°/秒 | |||||
| 加速度センサ範囲 | ± 2 g | ± 18 g | ± 2 g | |||||
| SPI | RSD-RX。 イーサネット | |||||||
| 温度範囲 | -5℃~+45℃ | -40℃~+85℃ | -5℃~+75℃ | |||||
| マウント時サイズ | 57x45x11 | “/>100x100x100 | ||||||
| 重量 | 33 | 16 |
Table 1.をご参照ください。
現在市販されている小型慣性計測ユニットの比較。

Figure 3.
次の機能ブロックは、磁力計(スキーマMAG(X), MAG(Y), MAG(Z) )を用いて地球磁場を測定する。 センサーの測定軸は、右手直交座標系を向いている。 センサーからのアナログ出力は、アナログ-デジタルコンバーターと、設定可能なフィルターブロックに接続されています。 測定可能な最大値は、1.3~81の範囲で、分解能は1/1055です。
最後の機能ブロックには、加速度計、ジャイロスコープ、磁気計の読み取り値の温度補正を可能にするために、IMUの環境の温度を測定する温度計が含まれています。 アルゴリズムに必要なパラメータを保存するために、追加のメモリが追加されました(スキーマでeepromとマークされています)。 CPUは、データがCANまたはUSBまたはRS-232出力にリダイレクトされる前にフィルタリングを実行します。 フィルタリングアルゴリズムのパラメータを確立するために、キャリブレーションフェーズが必要です。
| 内部センサー | Gyroscopes range | ||
| Accelerometer range | from ± 2 to ± 8 g | Digital output | CAN, USB or RS-232 |
Table 2.のように、デジタルで表示できます。
発表した慣性計測ユニットの内部特性。
発表したIMUセンサーの体積はハウジングと合わせて2cm3以下、重量は3.13。 このようなセンサーのサイズは、ロボットの設計者が相当な大きさのデバイスからマイクロスケールのデザインに移行することを可能にする。 入力電圧は3.5~8V、消費電流は35mAで、最大加速度は500Vです。 センサーを様々な場所に取り付けることができるように、3種類のハウジングがあります。 最も小さいMicroバージョン(図4)は、取り付け時のサイズが18.6 x 14.7 x 7.3 。 取り付け穴を追加したMicro-Mountingバージョン(図5a)は、18.6 x 20.7 x 7.3です。 MicroバージョンとMicro-Mountingバージョンのハウジングの出力ケーブルは、バージョンによってUSBまたはRS-TTLのコネクタが指定されています。 また、ハウジングに取り付け穴とLEMOプラグが埋め込まれた拡張バージョンもあります(図5b)。 サイズは32.0 x 18.0 x 16.5です。
すべてのバージョンの物理的な寸法を表3に示します。.

Figure 4.
慣性計測ユニットの表側、裏側の様子です。
図5に示すように、上面にはキャリブレーションされた軸の向きが刻まれ、色分けされている。
IMU を物理的なオブジェクトに適用する前に、自律移動体のナビゲーションの可能性を検証するために、市場で入手可能な最小のセンサの比較が行われました。 比較研究は、プロトタイプに設定されたパラメータの確認、測定誤差の原因の分析、および試験を行ったセンサが極端な状況でどのように動作するかを確認するために設計されたものであった。 テストには、市販の小型センサーを2つ使用しました。 XSens Technologies社のMTiG-28GとMicrostrain社のCrista IMUです(図6b)。
| IMU type | Dim. X | Dim. Y | Dim. Z | Units | Volume | |||||||||||||||
| Micro version | 18.6 | 14.0 | Dim.7 | 7.3 | 1,996 cm3 | |||||||||||||||
| Micro-Mounting version | 18.6 | 14.6 | 20.7 | mm | 2,811 cm3 | |||||||||||||||
| 拡張バージョン | 32.0 | 16.5 | 18.0 | mm | ||||||||||||||||
| 共通パラメータ | Min. | Max. | Type | Min. | Type | Max. | Min. | Units | ||||||||||||
| 重量(ハウジングなし) | – | – | gram | |||||||||||||||||
| 重量(ハウジングあり) | – | – | – | – | – | – | – | – | – | – | – | – | – | – | – | – | – | – | gram | |
| 動作温度 | -40 | – | ℃ | |||||||||||||||||
| 保存温度- | – | 100 | °C | |||||||||||||||||
| 最大加速度 | 500 | – | g | |||||||||||||||||
| 入力電圧3.0 | – | – | – | – 5.0 | 6.0 | V | ||||||||||||||
| 電流 | 30 | 35 | 40 | mA | ||||||||||||||||
テーブル3.0
5.5
6.5
5.0
5.0
V
Physical characteristic of the sensor.

Figure 5.センサーの物理的特性。

Figure 6.
A)市場で入手できる製品に対する提示IMUサイズの比較、b)IMU比較のプラットフォームです。 提示されたIMUは赤い楕円で示されています。 画像の左側には、Crista IMUが見えます。 5663>
比較研究を行うために、校正プラットフォームが設計、製作、使用されました(図6b)。 テストしたすべてのIMUはプラットフォームに取り付けられ、その生データは、提示された校正方法を使用して、すべてのセンサーのための共通の座標系に校正されました。 いくつかのテストが行われました:生データの比較、フィルタリングされたデータの比較、センサーの時間安定性、温度補償の機能。 図7aは、IMUセンサーの加速度計(図中のCZK)とMTiGセンサー(図中のMTI)の読み取りの比較、図7bはジャイロスコープの比較を示しています。 両方の比較は運動中に記録されました。
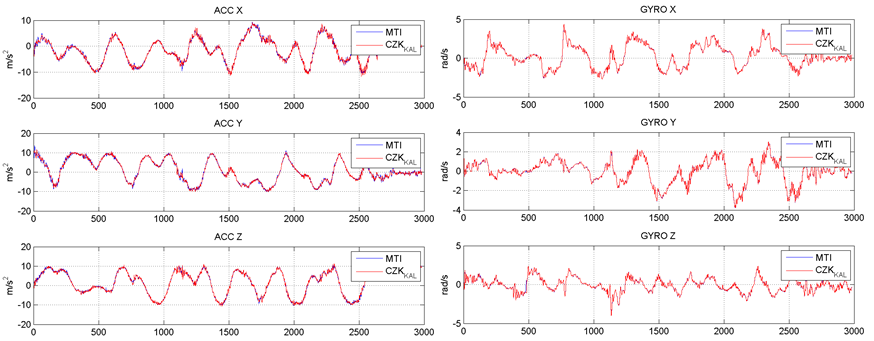
Figure 7.
プレゼントのIMUセンサーと市場で入手できるセンサーについての比較検討からのチャートの例です。 発表したIMUセンサーはCZK、XSens Technologies社のMTiGセンサーはMTIと表記しています。 時間単位は、a) 加速度計からの読み取り値、b) ジャイロスコープからの読み取り値です。
発表した校正済みセンサーと基準センサーからの出力データがほとんど同じであることに気づくことができます。 この違いを測定するために、我々は生データから信号を推定し、ノイズ成分から分離した。 発表ではジャイロスコープのY軸のみを例として選びました。 これは、軸やセンサー(磁力計、加速度計、ジャイロスコープ)に関係なく、達成された結果が同等であるため、選択することが可能でした。 図8の右側には、Crista IMUの結果が約0.12であるのに対し、MTi-G28と我々のセンサのノイズの標準偏差は約0.04であることが示されている。 MTi-G28と当社センサーの標準偏差の差は0.0035であり、これは通常、人間の目では区別できない。 4.
慣性計測装置の重要な問題は、出力データの時間的安定性である。 我々は4時間の安定性試験を実施した。 図9に示す結果は、試験中の各IMUの5つのサンプルから平均化した後に取得されたものである。 2つの主要な観察がなされます。 まず、MTi-G28と我々のIMUの結果は同等であることです。 平均値の差はわずか0.00027で、標準偏差の差は0.00226と、動きのあるテストよりもさらに小さくなっています。 2つ目の観察は、当社のセンサーとMTi-G28の結果は、実際の0値に20倍以上近いということです。

Figure 8.
試験したセンサー(MTiG-28、Crista IMU、当社センサー)のジャイロのY軸からの移動中の出力データの比較。 時間単位は.
| MTiG (S/ NKAL) | IMU 5 (S/NKAL) | ||
| Accelerometer | 38,1 | 43,2 | |
| 磁力計 | N/A | 719,3 | 767,9 |
| Gyroscopes | 13,6 | 206,7 | 254,5 |
テーブル4.
テストしたIMUのS/N係数の比較。 (
GPSが世界中で利用できること、読み取り値の信頼性が比較的高いこと、追加のインフラが不要であることが、現代の慣性航法システムのほとんどがGPSを使用している主な理由です。 INSは一般的に、速い更新レートと小さいが拘束されない誤差を特徴とすることができます。 GPSの誤差は限定的ですが、更新時間が遅く、姿勢推定の信頼性は高くありません。 GPSモジュールのほとんどは閉じたアーキテクチャのため、融合手法の最も一般的な方法のタイプは、非結合または疎結合の補佐と呼ばれています。 車両安全システムにおいて、GPSを用いたINSは車両の横滑り推定に利用されています。 標準的な使用方法は、車両の誘導とナビゲーションです。 GPS信号は、衛星がはっきり見えることが必要ですが、峡谷、特に都市部の峡谷環境では、しばしば不可能です。 GPS/INSシステムは、クアドロコプターのナビゲーションやミサイルの誘導によく利用されます。

図9.
試験したセンサー(MTiG-28、Crista IMU、当社センサー)のジャイロのY軸からの安定性試験中の出力データの比較。 グラフ内の各値は、センサーからの 5 サンプルの平均値です。
私たちは、単一の PCB に組み込まれた完全なナビゲーション ソリューションとしての慣性ナビゲーション システムを開発しました。 これは、全地球測位システム (GPS) モジュールを伴う、上記の 10-DOF 慣性測定ユニットを含んでいます。 GPSの高度推定精度の低さを補うために、気圧計を追加で組み込みました。 このINSは、3次元の角度、3次元の加速度、最も強い磁気信号の方向、周囲の温度を測定することができます。 センサーのサイズと重量を減らすために、MEMS技術を利用しています。 MCXコネクタ付きINSプリント基板は、実装なしで3.67グラム、標準実装で8.86グラムです。
センサからの測定データは、バージョンに応じて、データ転送の代表的な業界標準であるUSBまたはCANバスを通じて送信することが可能です。 既存のシステムに統合するために、最新のセンサーには柔軟性が求められます。 同じ理由で、このセンサーは柔軟な出力データ構成を持っています。 センサーの出力は、生のセンサーデータ、校正と温度補正後のデータ、処理フィルタの出力という3つのバージョンで取得することができます。 また、センサーからのデータは、様々な形でユーザーに提供されることがあります。 最初の形態は、デバイスからのデータに基づいて生成される回転マトリックスです。 また、データはオイラー角の形でエンドユーザーに提供され、その値は度またはラジアン単位で与えられます。 3つ目の出力データ表現は、四元数(Quaternion)を使用するものである。 GPSからの出力位置座標は、ECEF(Earth Centered Earth Fixed)座標系で送信されます。 GPSによる推定速度の単位はm/sである。使用する内蔵型大気圧高度計は、内部温度補正を行うことが特徴である。 20~110kPa の気圧を 1.5Pa の分解能で測定でき、30cm の分解能でセンサーの高度を推定することができる。 センサーの地理的位置は、GPSモジュールを使用して計算されます。 GPS はシリアル通信バスでマイクロプロセッサーに接続されています。 座標推定の品質を向上させるために、GPSの差分補正(DGPS)を行うことが可能です。 GPSからの出力は地球中心座標系(ECEF)で、周波数は10Hzである。 このようなセンサーの大きさは、ロボットの設計者が、相当な大きさの装置からマイクロスケールの設計に移行することを可能にする。 また、入力電圧は3.5~8V、消費電流は50mAで、最大加速度は500Vである。 センサーを様々な場所に取り付けることができるように、2種類のハウジングが用意されています。 最も小さいものはMicroバージョン(図10)で、取り付け時のサイズは32.7×14.9×8.0です。 MCXコネクター付きのバージョン(図3b)は、32.7 x 14.9 x 12.1 です。 拡張バージョンの体積は6cm3以下です。 センサーは-40℃から80℃までの幅広い温度範囲で動作します。
すべてのバージョンの物理的な測定値を表5に示します。.

Figure 10.
MCX コネクターのある慣性ナビゲーション システム基板の表 (a) と裏 (b) 面です。
| INS type | Dim. X | Dim. Y | Dim. Z | Units | Volume | |||||||||||||
| Micro version | 32.7 | 14.9 | 8.0 | Micro Version | Dim.0 | mm | 3.897 cm3 | |||||||||||
| Extended version | 32.7 | 14.1 | 4.0 | 8.9 | 12.1 | mm | 5.895 cm3 | |||||||||||
| Common parameters | Min.X.X.X.X.X.X.X.X.X.X.X.X.X.X.X.X.X.X.X.X.X.X.X.X. | Type | Max. | Units | ||||||||||||||
| 重量(ハウジングなし) | – | – | gram | |||||||||||||||
| Weight (w/over housing) | – | 8.86 | – | gram | ||||||||||||||
| 動作温度 | -40 | – | ℃ | |||||||||||||||
| 保存温度 | – | – | – | – | – | – | – | – | – | – | 80 | ℃ | – | – | 100 | °C | ||
| 最大加速度 | 500 | – | g | |||||||||||||||
| 入力電圧3.0 | -入力。5 | 6.0 | V | |||||||||||||||
| 電流 | 40 | 50 | 60 | mA | ||||||||||||||
表5.
センサの物理的特性。
図に示すように、上面にキャリブレーションした軸の向きを刻み、色分けしています。 11.

Figure 11.
INS mount schema. a) マイクロマウント版、b) 拡張版。
導入したINSは、体積が2以下の最小のIMUと比較された。 図12abに測定軸とサイズ軸の両方を示す。 超小型IMU5のX寸法は18.6であり、INSの約57%の大きさである。 Y寸法は14.7でINSの約99%、Z寸法はMicro IMUの91%、Extended IMUの60%とほぼ等しくなっています。 しかし、拡張LEMOバージョンのIMUは18であり、マイクロバージョンのINSの225%である。 体積で比較すると、マイクロ版INSの方が2倍弱(マイクロ版IMUの195%)大きいということになります。

Figure 12.
提案する INS (b) と世界最小 IMU (a) の比較である。 画像には計測軸が描かれている。 c) 提案するINSとIMUの実装サイズの比較、d) 提案するINSとIMUの外形特性の比較