制御システムの性能を上げるために、さまざまな種類のコントローラが使用されます。 この章では、比例制御器、微分制御器、積分制御器といった基本的な制御器について説明します。
比例制御器
比例制御器は、誤差信号に比例した出力を出します。
$u(t) \propto e(t) $$
$Rightarrow u(t)=K_P e(t)$$
Apply Laplace transform on both the sides – (両端にラプラス変換を適用)
$U(s)=K_P E(s)$
$frac{U(s)}{E(s)}=K_P$
forefore, 比例制御器の伝達関数は$K_P$である。
ここで、
U(s)は作動信号u(t)のラプラス変換
E(s)は誤差信号e(t)のラプラス変換
KPは比例定数
比例制御器を備えたユニティ負帰還閉ループ制御系のブロック図は下図に示すとおりである。

比例制御器は、過渡応答を要求に応じて変更するために使用します。
微分制御器
微分制御器は、誤差信号を微分した出力を生成します。
$$u(t)=K_D \frac{text{d}e(t)}{text{d}t}$
両端にラプラス変換をかけてください。
$U(s)=K_D sE(s)$$
$$frac{U(s)}{E(s)}=K_D s$
したがって、微分コントローラの伝達関数は$K_D s$となる。
微分制御器とともにユニティ負帰還閉ループ制御系のブロック図を下図に示す。
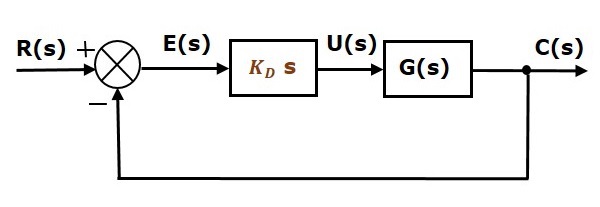
微分制御器は不安定な制御系を安定にするために使用されます。
積分制御器
積分制御器は誤差信号の積分を出力として出します。
$u(t)=K_I \int e(t) dt$
Apply Laplace transform on both the sides –
$U(s)=THERIfrac{K_I E(s)}{s}$
$THERIfrac{U(s)}{E(s)}=THERIfrac{K_I}{s}$
Theforefore, 積分コントローラの伝達関数は$frac{K_I}{s}$となります。
ここで、$K_I$は積分定数である。
ユニティ負帰還閉ループ制御系と積分制御器のブロック図を下図に示します。
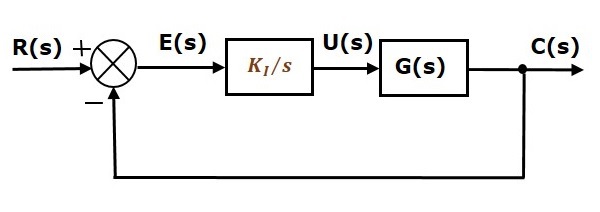
積分制御器は定常誤差を減らすために使用します。
それでは、基本制御器の組み合わせについて説明しましょう。
比例微分(PD)コントローラ
比例微分コントローラは、比例コントローラと微分コントローラの出力を合わせた出力を出します。
$u(t)=K_P e(t)+K_D \frac{text{d}e(t)}{text{d}t}$
Apply Laplace transform on both sides -。
$U(s)=(K_P+K_D s)E(s)$$
$$frac{U(s)}{E(s)}=K_P+K_D s$
では、そのため。 比例微分制御器の伝達関数は $K_P + K_D s$ となります。
比例微分制御器とともにユニティ負帰還閉ループ制御系のブロック図を下図に示す。
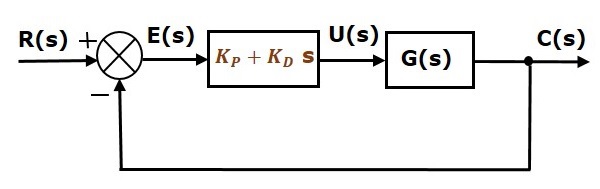
比例微分コントローラは、定常誤差に影響を与えずに制御系の安定性を向上させるために使用します。
比例積分(PI)コントローラ
比例積分コントローラは、比例と積分の出力を組み合わせた出力を生成する。
$u(t)=K_P e(t)+K_I \int e(t) dt$
両辺にラプラス変換をかけると-。
$$U(s)=Threeleft(K_P+Threefrac{K_I}{s} \right )E(s)$$
$$Threefrac{U(s)}{E(s)}=K_P+Threefrac{K_I}$
foreur.Thes.U(s) {Threefrac{K_I} {S}$$Threefrac{S}{S}$
Threefrac{S}$
ユニティ負帰還閉ループ制御系と比例積分コントローラのブロック図を下図に示します。
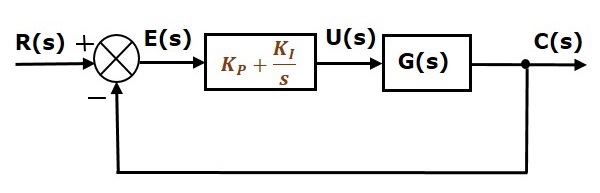
比例積分コントローラは、制御系の安定性に影響を与えずに定常誤差を減らすために使用します。
比例積分微分(PID)コントローラ
比例積分微分コントローラからは比例、積分、微分の出力を合わせたものを出します。
$u(t)=K_P e(t)+K_I \int e(t) dt+K_D \frac{text{d}e(t)}{text{d}t}$
Apply Laplace transform on both sides – (両辺のラプラス変換)
$U(s)=Threeleft(K_P+Threefrac{K_I}{s}+K_D s \right )E(s)$$
$Threefrac{U(s)}{E(s)}=K_P+Threefrac{K_I}{s}+K_D s$
Therefore.で、U(s)=Threeleft(K_P+Threefrac{K_I}/S}/S$$
ユニティ負帰還閉ループ制御系のブロック図を比例積分微分制御器とともに下図に示す。
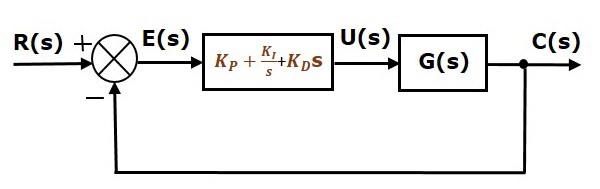
比例積分微分制御器は、制御系の安定性を高め定常誤差を減らすために用いられる。