Miniaturización de los sensores
Se prevé que la necesidad de miniaturizar cada vez más los dispositivos electrónicos para poder utilizarlos en herramientas cotidianas, robots en miniatura y vehículos aéreos no tripulados (UAV) se detendrá durante unos años antes de saltar más allá de los dispositivos de tamaño micro a nano. Por lo tanto, es necesario revisar las unidades de medición inercial disponibles actualmente en el mercado. Existen múltiples unidades de medición inercial comerciales disponibles en el mercado. Por ejemplo, 3DM-GX 1 de MicroStrain, MTi-G de Xsens Technologies, Crista IMU de Cloud Cap Technology, μNAV de Crossbow Technology, AHRS200AV2.5 de Rotomotion y ADIS 16400/405 de Analog Devices. Con el fin de verificar las capacidades de las soluciones mencionadas hemos comparado sus características con el estado actual de la MEMS IMU 5 en miniatura desarrollado por los autores del texto. La comparación es visible en la ficha. 1.
El estado actual de la IMU 5 10-DOF permite medir ángulos en tres dimensiones, aceleraciones también en tres dimensiones, la dirección de la señal magnética más fuerte y la temperatura del entorno. Utiliza la tecnología MEMS para reducir tanto el tamaño como el peso del sensor. El sensor pesa sólo 1,13 sin montaje y 3,13 con el montaje estándar.
Los datos de medición del sensor IMU 5, dependiendo de la versión, se pueden enviar a través del bus USB o CAN o RS-232, que son los estándares típicos de la industria de transferencia de datos. La flexibilidad se requiere de los sensores modernos con el fin de integrarlo con un sistema existente. Por la misma razón, el sensor tiene una configuración de datos de salida flexible. La salida del sensor puede adquirirse en tres versiones: como datos brutos del sensor, como datos después de la calibración y la compensación de la temperatura, o como la salida del filtro de procesamiento. Los datos de los sensores, también pueden ser entregados en varias formas al usuario. La primera forma es la matriz de rotación, que se genera a partir de los datos del dispositivo. Los datos también pueden ser suministrados al usuario final en forma de ángulos de Euler y sus valores dados en grados o en radianes. El tercer tipo de representación de los datos de salida es mediante el uso de cuaterniones.
Esquema del funcionamiento de la unidad de micro medición se presenta en la fig. 3 y las características internas en la ficha. 2.
Uno de los sensores inerciales fundamentales es el giroscopio que mide la velocidad angular Ω (en el esquema GYRO(X), GYRO(Y), GYRO(Z)). Estos sensores fueron orientados de tal manera que sus ejes de medición crean un sistema de coordenadas cartesianas a la derecha. La salida de las señales analógicas de tipo MEMS se filtra mediante un filtro de paso bajo configurable (12,5, 25, 50, 110 Hz). Tras el filtrado, la señal se convierte en forma digital mediante un convertidor analógico-digital caracterizado por una resolución de 16 bits. La señal digital puede ser filtrada además por filtros configurables de paso bajo y alto. La frecuencia de los datos de los giroscopios se puede configurar en 100, 200, 400 u 800 Hz. La resolución de las mediciones se puede configurar con una precisión modificada en el rango de 250 °/s a 2000 °/s.
Otro elemento importante en el esquema es el bloque de sensores de aceleraciones lineales (en el esquema ACC(X), ACC(Y), ACC(Z)). Los sensores fueron orientados de tal manera que los ejes de medición también crean un sistema de coordenadas cartesianas a la derecha. Las señales analógicas de la salida MEMS de los sensores fueron redirigidas al filtro y posteriormente al convertidor analógico-digital. La resolución máxima de las aceleraciones medidas puede configurarse a ±2/±4/±8 (g ≇9,81m/s2). La sensibilidad de los acelerómetros se midió como 1 .
| Productor | MicroStrain | Xsens Technologies | Cloud Cap Technology |
| Modelo | 3DM-GX1 | MTi-G | Crista IMU |
| Sensores internos | acelerómetros, giroscopios, magnetómetros, sensor de temperatura | acelerómetros, magnetómetros, giroscopios, GPS | acelerómetros, giroscopios, sensor de temperatura |
| Giroscopios rango | ± 300°/seg | ± 300°/seg | ± 300°/seg |
| Rango de los acelerómetros | ± 5 g | ± 5 g | ± 10 g |
| Salida digital | RS-232, RS-485 | RS-232, USB | RS-232, CAN |
| Rango de temperatura | -40°C a +70°C | -20°C a +60°C | -40°C a +70°C |
| Tamaño con montaje | 64x90x25 | 58x58x33 | 52.07×38.8×25.04 |
| Peso | 75 | 68 | 38.6 |
| Productor | Tecnología Crossbow | Dispositivos Analógicos | Rotomotion |
| Modelo | μNAV | ADIS 16400/405 | AHRS200AV2.5 |
| Sensores internos | acelerómetros, giroscopios, magnetómetros, sensor de temperatura, GPS | acelerómetros, magnetómetros, giroscopios, sensor de temperatura | acelerómetros, giroscopios, magnetómetros |
| Giroscopios rango | ± 150°/seg | ± 75-300°/seg | ± 90°/seg |
| Rango de los acelerómetros | ± 2 g | ± 18 g | ± 2 g |
| Salida digital | RS-232 | SPI | RS-232, Ethernet |
| Rango de temperatura | -5°C a +45°C | -40°C a +85°C | -5°C a +75°C |
| Tamaño con montaje | 57x45x11 | 31.9×23.5×22.9 | «/>100×100 |
| Peso | 33 | 16 | «/>100 |
Tabla 1.
Comparación de las unidades de medición inercial en miniatura actualmente disponibles en el mercado.

Figura 3.
El esquema de funcionamiento de la IMU.
El siguiente bloque funcional mide el campo magnético terrestre utilizando magnetómetros (en el esquema MAG(X), MAG(Y), MAG(Z)). Los ejes de medición de los sensores están orientados en el sistema de coordenadas cartesianas de la derecha. La salida analógica de los sensores se conecta con un convertidor analógico-digital y además con un bloque de filtros configurables. Los valores máximos posibles de medir están en el rango de 1.3 a 81. con una resolución de 1/1055.
El último bloque funcional contiene un termómetro que mide la temperatura en el entorno de la IMU para permitir la compensación de la temperatura de las lecturas de los acelerómetros, giroscopios y magnetómetros.
Todos los bloques funcionales están conectados con la unidad central de procesamiento marcada en el esquema uProcessor. Para almacenar los parámetros necesarios para los algoritmos se añadió una memoria adicional (marcada en el esquema como eeprom). La CPU realiza el filtrado antes de que los datos sean redirigidos a la salida CAN o USB o RS-232. Para establecer los parámetros del algoritmo de filtrado se requiere la fase de calibración.
| Sensores internos | acelerómetros, giroscopios, magnetómetros, sensor de temperatura | Giroscopios rango | de ± 250 a 2000°/seg |
| Acelerómetros rango | de ± 2 a ± 8 g | Salida digital | CAN, USB o RS-232 |
Tabla 2.
Características internas de la unidad de medición inercial presentada.
El volumen del sensor IMU presentado es inferior a 2cm3 con carcasa y pesa 3,13. Tal tamaño del sensor puede permitir a los diseñadores de robots pasar de los dispositivos de tamaño considerable a los diseños de la microescala. El sensor de aceleración máximo que es capaz de soportar es de 500 , mientras que la tensión de entrada es de 3,5 a 8V, y el consumo de corriente es de 35 mA. Hay tres tipos diferentes de la carcasa que permite la fijación del sensor en varios lugares. La versión más pequeña Micro (fig. 4) tamaño con el montaje es 18,6 x 14,7 x 7,3 . La versión con los agujeros de montaje adicionales versión Micro-Mounting (fig. 5a) es de 18,6 x 20,7 x 7,3 . El cable de salida de las carcasas de la versión Micro y de la versión Micro-Mounting está equipado con un conector USB o RS-TTL, dependiendo de la versión. También hay una versión ampliada con agujeros de montaje y un conector LEMO incrustado en la carcasa (fig. 5b). Su tamaño es 32.0 x 18.0 x 16.5 .
Las medidas físicas de todas las versiones se presentan en la Tab.3.

Figura 4.
La parte delantera y trasera de la unidad de medición inercial.
Las orientaciones de los ejes calibrados están grabadas y coloreadas en la parte superior como se presenta en la Fig. 5. El tamaño de la montura simple es de 6,15 mm para la versión de micromontaje, y de 6,50 mm para la versión LEMO extendida.
Antes de la aplicación de la IMU en los objetos físicos se realizó una comparación entre los sensores más pequeños disponibles en el mercado para verificar la posibilidad de navegación de vehículos móviles autónomos. Los estudios comparativos se diseñaron para comprobar los parámetros establecidos en el prototipo, analizar las causas de los errores de medición y comprobar cómo se comportan los sensores con los que se realizaron las pruebas en situaciones extremas. Para las pruebas se utilizaron dos populares sensores comerciales en miniatura: MTiG-28G de XSens Technologies y Crista IMU de Microstrain (fig. 6b).
| Tipo de IMU | Dim. X | Dim. Y | Dim. Z | Unidades | Volumen |
| Versión micro | 18,6 | 14.7 | 7,3 | mm | 1,996 cm3 |
| Versión micro | 18.6 | 20,7 | 7,3 | mm | 2,811 cm3 |
| Versión extendida | 32.0 | 16,5 | 18,0 | mm | 9,504 cm3 |
| Parámetros comunes | Min. | Tipo | Max. | Unidades | |
| Peso (sin carcasa) | – | 1,13 | – | gramo | |
| Peso (con carcasa) | – | 3.13 | – | gramo | |
| Temperatura de funcionamiento | -40 | – | 80 | °C | |
| Temperatura de almacenamiento | -60 | – | 100 | °C | |
| Aceleración máxima | – | 500 | – | g | |
| Tensión de entrada | 3.5 | 5,0 | 6,0 | V | |
| Corriente | 30 | 35 | 40 | mA | |
Tabla 3.
Característica física del sensor.

Figura 5.
El esquema de montaje de la micro IMU. a) Versión de micro montaje, b) Versión LEMO extendida.

Figura 6.
A) Comparación del tamaño de la IMU presentada con los productos disponibles en el mercado, b) Plataforma de comparación de la IMU. La IMU presentada está marcada por la elipse roja. En la parte izquierda de la imagen se puede ver la IMU Crista. En el otro lado se puede ver la MtiG Imu de XSense Technologies.
Para realizar los estudios comparativos se diseñó, produjo y utilizó una plataforma de calibración (fig. 6b). Todos los IMUs probados se montaron en la plataforma y sus datos brutos se calibraron al sistema de coordenadas común para todos los sensores utilizando el método de calibración presentado. Se realizaron varias pruebas: la comparación de los datos brutos, la comparación de los datos filtrados, la estabilidad temporal de los sensores y la capacidad de compensación de la temperatura. En la fig. 7a se presenta la comparación de las lecturas de los acelerómetros del sensor IMU presentado (CZK en el gráfico) y del sensor MTiG (MTI en el gráfico) y en la fig. 7b se presenta la comparación de los giroscopios. Ambas comparaciones se registraron durante el movimiento.
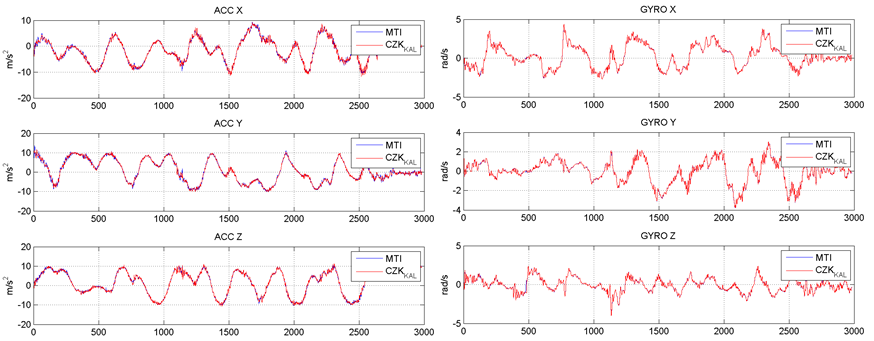
Figura 7.
Un gráfico de ejemplo de estudios comparativos del sensor IMU presentado y los sensores disponibles en el mercado. El sensor IMU presentado está etiquetado como CZK y el sensor MTiG de XSens Technologies está etiquetado como MTI. Las unidades de tiempo son . a) las lecturas de los acelerómetros, b) las lecturas de los giroscopios.
Se puede notar que los datos de salida del sensor calibrado presentado y el sensor de referencia son casi los mismos. Para medir las diferencias hemos estimado la señal a partir de los datos brutos y la hemos separado de la componente de ruido. Sólo se ha elegido como ejemplo para la presentación el eje de medición Y del giroscopio. La elección fue posible porque los resultados obtenidos son comparables independientemente del eje y del sensor (magnetómetros, acelerómetros o giroscopios). En la parte derecha de la fig. 8 se presenta que la desviación estándar del ruido para el MTi-G28 y nuestro sensor es de aproximadamente 0,04 mientras que el resultado de la IMU Crista es de aproximadamente 0,12. La diferencia entre la desviación estándar de MTi-G28 y nuestro sensor es sólo 0,0035 que es generalmente indistinguible por el ojo humano.
La tabla adicional de cotejo del coeficiente señal/ruido se presenta en la pestaña. 4.
Un problema importante para las unidades de medición inercial es la estabilidad temporal de los datos de salida. Hemos realizado una serie de pruebas de estabilidad con una duración de 4h. Los resultados presentados en la fig. 9 fueron adquiridos después de promediar cinco muestras de cada IMU en la prueba. Se pueden hacer dos observaciones principales. En primer lugar, los resultados del MTi-G28 y de nuestra IMU son comparables. La diferencia de los valores medios obtenidos es sólo de 0,00027 y la diferencia entre los valores de desviación estándar es de 0,00226, que es incluso menor que durante la prueba con movimiento. La segunda observación es que los resultados de nuestro sensor y del MTi-G28 están más de 20 veces más cerca del valor real 0.

Figura 8.
La comparación de los datos de salida durante el movimiento del eje Y de los giroscopios para los sensores probados (MTiG-28, Crista IMU y nuestro sensor). Las unidades de tiempo son .
| Crista IMU (S/NKAL) | MTiG (S/ NKAL) | IMU 5 (S/NKAL) | |
| Acelerómetros | 20,3 | 38,1 | 43,2 |
| Magnetómetros | N/A | 719,3 | 767,9 |
| Giroscopios | 13,6 | 206,7 | 254,5 |
Tabla 4.
La comparación del coeficiente señal/ruido para las IMUs probadas. (Cuanto mayor sea el valor, mejor).
La disponibilidad global del GPS, la fiabilidad relativamente alta de las lecturas y la no necesidad de infraestructura adicional son las principales razones por las que la mayoría de los sistemas modernos de navegación inercial utilizan el GPS. Los sistemas de navegación inercial suelen caracterizarse por una rápida tasa de actualización y un error pequeño pero no limitado. El error del GPS está limitado, pero el tiempo de actualización es lento y la estimación de la actitud no es fiable. Debido a la arquitectura cerrada de la mayoría de los módulos GPS, el método más popular de los métodos de fusión se denomina ayuda desacoplada o débilmente acoplada. El INS con el GPS se utiliza en los sistemas de seguridad de los vehículos para estimar el deslizamiento lateral de un vehículo. El uso estándar consiste en el guiado y la navegación del vehículo. La señal GPS requiere una visibilidad clara de los satélites que a menudo no es posible en los cañones, especialmente en los entornos urbanos de los cañones. Los sistemas GPS/INS se utilizan a menudo para la navegación de un cuadricóptero o el guiado de misiles.

Figura 9.
La comparación de los datos de salida durante la prueba de estabilidad del eje Y de los giroscopios para los sensores probados (MTiG-28, Crista IMU y nuestro sensor). Cada valor en el gráfico es un valor medio de 5 muestras del sensor.
Hemos desarrollado un sistema de navegación inercial como una solución de navegación completa incrustada en un solo PCB. Contiene la unidad de medición inercial de 10-DOF presentada anteriormente acompañada del módulo del Sistema de Posicionamiento Global (GPS). Para compensar la baja precisión de la estimación de la altitud del GPS se incorporó un barómetro adicional. El INS descrito permite medir ángulos en tres dimensiones, aceleraciones también en tres dimensiones, la dirección de la señal magnética más fuerte y la temperatura del entorno. Utiliza la tecnología MEMS para reducir tanto el tamaño como el peso del sensor. La placa de circuito impreso INS con conector MCX pesa 3,67 gramos sin montaje y 8,86 gramos con el montaje estándar.
Los datos de medición del sensor, dependiendo de la versión, pueden enviarse a través del bus USB o CAN, que son los estándares típicos de la industria para la transferencia de datos. La flexibilidad se requiere de los sensores modernos con el fin de integrarlo con un sistema existente. Por la misma razón, el sensor tiene una configuración de datos de salida flexible. La salida del sensor puede adquirirse en tres versiones: como datos brutos del sensor, como datos después de la calibración y la compensación de la temperatura, o como la salida del filtro de procesamiento. Los datos de los sensores, también pueden ser entregados en varias formas al usuario. La primera forma es la matriz de rotación, que se genera a partir de los datos del dispositivo. Los datos también pueden ser suministrados al usuario final en forma de ángulos de Euler y sus valores dados en grados o en radianes. El tercer tipo de representación de los datos de salida es mediante el uso de cuaterniones. Las coordenadas de posición de salida del GPS se envían en el sistema de coordenadas fijas centradas en la Tierra (ECEF). La unidad de la velocidad estimada por el GPS es m/s.El altímetro de presión atmosférica integrado utilizado se caracteriza por la compensación interna de la temperatura. Permite medir la presión atmosférica en el rango de 20 a 110 kPa con una resolución de 1,5 Pa. Puede utilizarse para estimar la altitud del sensor con una resolución igual a 30cm. La localización geográfica del sensor se calcula mediante el módulo GPS. El GPS está conectado al microprocesador mediante un bus de comunicación en serie. Para mejorar la calidad de la estimación de las coordenadas es posible pasar al GPS correcciones diferenciales (DGPS). La salida del GPS está en el sistema de coordenadas fijo centrado en la Tierra (ECEF) y la frecuencia es de 10 Hz.
El volumen del sensor INS presentado está por debajo de 4cm3 con la carcasa y pesa 8,86 . Tal tamaño del sensor puede permitir a los diseñadores de robots para pasar de dispositivos de tamaño considerable a los diseños de la escala micro. El sensor de aceleración máxima es capaz de soportar es de 500 , mientras que la tensión de entrada es de 3,5 a 8V, y el consumo de corriente es de 50 mA. Hay dos tipos diferentes de la carcasa que permite la fijación del sensor en varios lugares. La más pequeña versión Micro (fig. 10) tamaño con montaje es 32,7 x 14,9 x 8,0 . La versión con el conector MCX (fig. 3b) es de 32,7 x 14,9 x 12,1 . El volumen de la versión ampliada es inferior a 6 cm3. El sensor puede funcionar en un amplio rango de temperaturas que van desde -40°C hasta 80°C.
Las medidas físicas de todas las versiones se presentan en la Tab.5.

Figura 10.
La parte delantera (a) y trasera (b) de la placa de circuito impreso del sistema de navegación inercial con conector MCX.
| Tipo INS | Dim. X | Dim. Y | Dim. Z | Unidades | Volumen |
| Versión micro | 32,7 | 14,9 | 8.0 | mm | 3,897 cm3 |
| Versión ampliada | 32,7 | 14.9 | 12,1 | mm | 5,895 cm3 |
| Parámetros comunes | Min. | Tipo | Máx. | Unidades | |
| Peso (sin carcasa) | – | 3.67 | – | gramo | |
| Peso (con carcasa) | – | 8.86 | – | gramo | |
| Temperatura de funcionamiento | -40 | – | 80 | °C | |
| Temperatura de almacenamiento | -60 | – | 100 | °C | |
| Aceleración máxima | – | 500 | – | g | |
| Tensión de entrada | 3.5 | 5,0 | 6,0 | V | |
| Corriente | 40 | 50 | 60 | mA | |
Tabla 5.
Característica física del sensor.
Las orientaciones de los ejes calibrados están grabadas y coloreadas en la parte superior como se presenta en la Fig. 11.

Figura 11.
El esquema de montaje del SIN. a) Versión de micromontaje, b) Versión extendida.
El INS introducido se comparó con la IMU más pequeña con un volumen inferior a 2 . Tanto los ejes de medición como los de tamaño están marcados en la fig 12ab. La dimensión X de la micro IMU 5 es de 18,6 que es aproximadamente el 57% del tamaño del INS. La dimensión Y es de 14,7 que es aproximadamente el 99% del tamaño del INS y el tamaño Z de la IMU es más o menos igual al 91% de la versión Micro del INS y el 60% de la versión Extendida. Sin embargo, la versión LEMO extendida de la IMU es de 18, lo que supone el 225% de la versión micro del INS. La comparación basada en el volumen sólo permite afirmar que la versión micro del INS es menos de dos veces mayor (195% de la versión micro de la IMU).

Figura 12.
La comparación del INS propuesto (b) con la IMU más pequeña del mundo (a). Los ejes de medición están dibujados en la imagen. c) La comparación del tamaño de montaje del INS presentado y la IMU, d) La comparación de las características externas del INS propuesto y la IMU.