Miniaturalizace senzorů
Předpokládá se, že potřeba stále větší miniaturizace elektronických zařízení za účelem jejich využití v každodenních nástrojích, miniaturních robotech a bezpilotních letadlech se na několik let zastaví, než dojde k dalšímu skoku z mikro na nanorozměry zařízení. Proto je třeba přezkoumat v současnosti na trhu dostupné inerciální měřicí jednotky. Na trhu je k dispozici několik komerčních inerciálních měřicích jednotek. Například 3DM-GX 1 od MicroStrain, MTi-G od Xsens Technologies, Crista IMU od Cloud Cap Technology, μNAV od Crossbow Technology, AHRS200AV2.5 od Rotomotion a ADIS 16400/405 od Analog Devices. Za účelem ověření možností uvedených řešení jsme porovnali jejich vlastnosti se současným stavem miniaturních MEMS IMU 5 vyvinutých autory textu. Srovnání je patrné v tab. 1.
Současný stav techniky IMU 5 10-DOF umožňuje měřit úhly ve třech rozměrech, zrychlení rovněž ve třech rozměrech, směr nejsilnějšího magnetického signálu a teplotu okolí. Využívá technologii MEMS s cílem snížit rozměry i hmotnost snímače. Senzor váží pouze 1,13 bez montáže a 3,13 se standardní montáží.
Měřená data ze senzoru IMU 5 lze v závislosti na verzi odesílat prostřednictvím sběrnice USB nebo CAN nebo RS-232, což jsou typické průmyslové standardy přenosu dat. Od moderních snímačů je vyžadována flexibilita, aby je bylo možné integrovat do stávajících systémů. Ze stejného důvodu má senzor flexibilní konfiguraci výstupních dat. Výstup senzoru lze získat ve třech verzích: jako surová data senzoru, jako data po kalibraci a teplotní kompenzaci nebo jako výstup filtru pro zpracování. Data ze snímačů mohou být uživateli dodávána také v různých formách. První formou je matice natočení, která je generována na základě dat ze zařízení. Data mohou být koncovému uživateli dodávána také ve formě Eulerových úhlů a jejich hodnot udávaných ve stupních nebo v radiánech. Třetí typ reprezentace výstupních dat je pomocí kvaternionů.
Schéma činnosti mikroměřicí jednotky je uvedeno na obr. 3 a vnitřní charakteristiky v tab. 3. 2.
Jedním ze základních inerciálních snímačů je gyroskop měřící úhlovou rychlost Ω (ve schématu GYRO(X), GYRO(Y), GYRO(Z)). Tyto senzory byly orientovány tak, že jejich měřicí osy vytvářejí pravotočivý kartézský souřadný systém. Výstup analogových signálů typu MEMS je filtrován konfigurovatelným dolnopropustným filtrem (12,5, 25, 50, 110 Hz). Po filtraci je signál převeden do digitální podoby analogově-digitálním převodníkem s rozlišením 16 bitů. Digitální signál lze dále filtrovat konfigurovatelnými dolno a hornopropustnými filtry. Frekvenci dat z gyroskopů lze nastavit na 100, 200, 400 nebo 800 Hz. Rozlišení měření lze konfigurovat s upravenou přesností v rozsahu od 250 °/s do 2000 °/s.
Dalším důležitým prvkem ve schématu je blok snímačů lineárního zrychlení (ve schématu ACC(X), ACC(Y), ACC(Z)). Snímače byly orientovány tak, aby měřicí osy vytvářely také pravotočivý kartézský souřadný systém. Analogové signály z výstupu snímačů MEMS byly přesměrovány do filtru a dále do analogově-digitálního převodníku. Maximální rozlišení měřených zrychlení lze nastavit na ±2/±4/±8 (g ≇9,81 m/s2). Citlivost akcelerometrů byla naměřena jako 1 .
| Výrobce | MicroStrain | Xsens Technologies | Cloud Cap. Technology |
| Model | 3DM-GX1 | MTi-G | Crista IMU |
| Interní senzory | akcelerometry, gyroskopy, magnetometry, teplotní čidlo | akcelerometry, magnetometry, gyroskopy, GPS | akcelerometry, gyroskopy, teplotní čidlo |
| Gyroskopy rozsah | ± 300°/sec | ± 300°/sec | ± 300°/sec |
| Rozsah akcelerometrů | ± 5 g | ± 5 g | ± 10 g |
| Digitální výstup | RS-232, RS-485 | RS-232, USB | RS-232, CAN |
| Teplotní rozsah | -40°C až +70°C | -20°C až +60°C | -40°C až +70°C |
| Rozměr s montáží | 64x90x25 | 58x58x33 | 52.07×38,8×25,04 |
| Hmotnost | 75 | 68 | 38.6 |
| Výrobce | Crossbow Technology | Analog Devices | Rotomotion |
| Model | μNAV | ADIS 16400/405 | AHRS200AV2.5 |
| Interní senzory | akcelerometry, gyroskopy, magnetometry, teplotní čidlo, GPS | akcelerometry, magnetometry, gyroskopy, teplotní čidlo | akcelerometry, gyroskopy, magnetometry |
| Gyroskopy rozsah | ± 150°/sec | ± 75-300°/sec | ± 90°/sec |
| Akcelerometry rozsah | ± 2 g | ± 18 g | ± 2 g |
| Digitální výstup | RS-232 | SPI | RS-232, Ethernet |
| Teplotní rozsah | -5°C až +45°C | -40°C až +85°C | -5°C až +75°C |
| Rozměr s montáží | 57x45x11 | 31.9×23,5×22,9 | „/>100x100x100 |
| Hmotnost | 33 | 16 | „/>100 |
Tabulka 1.
Srovnání aktuálně dostupných miniaturních inerciálních měřicích jednotek na trhu.

Obrázek 3.
Schéma činnosti IMU.
Další funkční blok měří magnetické pole Země pomocí magnetometrů (ve schématu MAG(X), MAG(Y), MAG(Z)). Měřicí osy snímačů jsou orientovány v pravotočivém kartézském souřadném systému. Analogový výstup ze snímačů je připojen k analogově-digitálnímu převodníku a dále k bloku konfigurovatelných filtrů. Maximální hodnoty, které je možné měřit, jsou v rozsahu od 1,3 do 81. s rozlišením 1/1055 .
Poslední funkční blok obsahuje teploměr, který měří teplotu v okolí IMU, aby bylo možné teplotně kompenzovat údaje akcelerometrů, gyroskopů a magnetometrů.
Všechny funkční bloky jsou propojeny s centrální procesorovou jednotkou označenou ve schématu uProcessor. Pro uložení parametrů potřebných pro algoritmy byla přidána další paměť (označená ve schématu jako eeprom). Centrální jednotka provádí filtrování před tím, než jsou data přesměrována na výstup CAN nebo USB nebo RS-232. Pro stanovení parametrů filtračního algoritmu je nutná kalibrační fáze.
| Interní snímače | akcelerometry, gyroskopy, magnetometry, teplotní čidlo | Gyroskopy rozsah | od ± 250 do 2000°/sec |
| Akcelerometry rozsah | od ± 2 do ± 8 g | Digitální výstup | CAN, USB nebo RS-232 |
Tabulka 2.
Vnitřní charakteristiky předložené inerciální měřicí jednotky.
Předložený snímač IMU má objem pod 2 cm3 s krytem a váží 3,13 kg. Taková velikost snímače může konstruktérům robotů umožnit přechod od zařízení značných rozměrů ke konstrukcím mikroměřítka. Maximální zrychlení, které je senzor schopen vydržet, je 500 , přičemž vstupní napětí je od 3,5 do 8 V a odběr proudu je 35 mA. Existují tři různé typy pouzder, které umožňují připevnění senzoru na různá místa. Nejmenší verze Micro (obr. 4) má rozměry s montáží 18,6 x 14,7 x 7,3 . Verze s přídavnými montážními otvory Verze Micro-Mounting (obr. 5a) má rozměry 18,6 x 20,7 x 7,3 . Pouzdra verze Micro a verze Micro-Mounting jsou vybavena výstupním kabelem s konektorem USB nebo RS-TTL v závislosti na verzi. K dispozici je také rozšířená verze s montážními otvory a konektorem LEMO zasazeným do pouzdra (obr. 5b). Její rozměry jsou 32,0 x 18,0 x 16,5 .
Fyzikální rozměry všech verzí jsou uvedeny v tab. 3..

Obrázek 4.
Přední a zadní strana inerciální měřicí jednotky.
Kalibrované orientace os jsou vyryty a barevně vyznačeny na horní straně, jak je uvedeno na obr. 5. Velikost jednotlivého upevnění je 6,15 mm pro verzi Micro-Mounting a 6,50 mm pro verzi Extended LEMO.
Před použitím IMU ve fyzických objektech bylo provedeno srovnání nejmenších dostupných snímačů na trhu za účelem ověření možnosti navigace autonomních mobilních vozidel. Cílem srovnávacích studií bylo ověřit nastavené parametry prototypu, analyzovat příčiny chyb měření a ověřit, jak se senzory, které prováděly testy, chovají v extrémních situacích. Pro testy byly použity dva populární komerční miniaturní senzory: MTiG-28G od společnosti XSens Technologies a IMU Crista od společnosti Microstrain (obr. 6b).
| IMU typ | Dim. X | Dim. Y | Dim. Z | Jednotky | Objem |
| Mikro verze | 18.6 | 14.7 | 7,3 | mm | 1,996 cm3 |
| Micro-Mounting verze | 18.6 | 20,7 | 7,3 | mm | 2,811 cm3 |
| Prodloužená verze | 32.0 | 16,5 | 18,0 | mm | 9,504 cm3 |
| Obvyklé parametry | Min. | Typ | Max. | Jednotky | |
| Hmotnost (bez pouzdra) | – | 1,13 | – | gramů | |
| Hmotnost (s pouzdrem) | – | 3.13 | – | gramů | |
| Provozní teplota | -40 | – | 80 | °C | |
| Skladovací teplota | -60 | – | 100 | °C | |
| Maximální zrychlení | – | 500 | – | g | |
| Vstupní napětí | 3.5 | 5,0 | 6,0 | V | |
| Proud | 30 | 35 | 40 | mA | |
Tabulka 3.
Fyzikální charakteristika snímače.

Obrázek 5. Fyzikální charakteristika snímače.
Montážní schéma mikro IMU. a) verze Micro-Mounting, b) verze Extended LEMO.

Obrázek 6.
A) Porovnání velikosti předložené IMU s výrobky dostupnými na trhu, b) srovnávací platforma IMU. Představená IMU je označena červenou elipsou. V levé části obrázku je vidět IMU Crista. Na druhé straně je vidět MtiG Imu od XSense Technologies.
Za účelem provedení srovnávacích studií byla navržena, vyrobena a použita kalibrační platforma (obr. 6b). Na tuto platformu byly namontovány všechny testované IMU a jejich nezpracovaná data byla kalibrována do společného souřadnicového systému pro všechny snímače pomocí předložené kalibrační metody. Bylo provedeno několik testů: porovnání surových dat, porovnání filtrovaných dat, časová stabilita snímačů a schopnost teplotní kompenzace. Na obr. 7a je uvedeno srovnání údajů z akcelerometrů prezentovaného senzoru IMU (v grafu CZK) a senzoru MTiG (v grafu MTI) a na obr. 7b je uvedeno srovnání gyroskopů. Obě porovnání byla zaznamenána za pohybu.
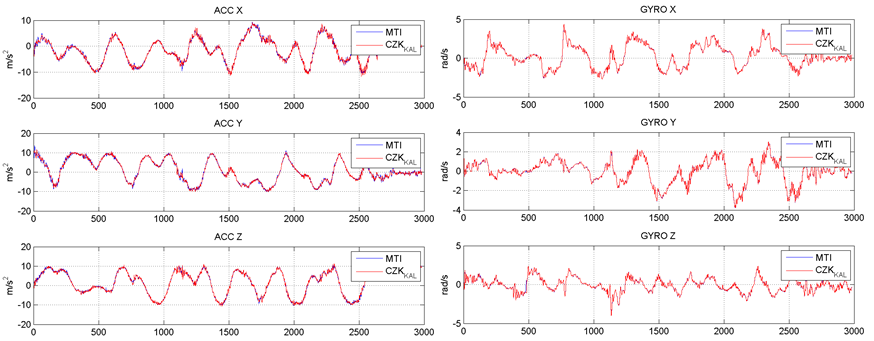
Obrázek 7.
Příkladový graf ze srovnávací studie prezentovaného snímače IMU a snímačů dostupných na trhu. Představený snímač IMU je označen jako CZK a snímač MTiG od společnosti XSens Technologies je označen jako MTI. Časovými jednotkami jsou . a) údaje z akcelerometrů, b) údaje z gyroskopů.
Můžeme si všimnout, že výstupní data z prezentovaného kalibrovaného senzoru a referenčního senzoru jsou téměř stejná. Abychom mohli změřit rozdíly, odhadli jsme signál ze surových dat a oddělili jej od šumové složky. Jako příklad pro prezentaci byla vybrána pouze měřicí osa Y gyroskopu. Výběr byl možný, protože dosažené výsledky jsou srovnatelné bez ohledu na osy a snímače (magnetometry, akcelerometry nebo gyroskopy). V pravé části obr. 8 je uvedeno, že směrodatná odchylka šumu pro MTi-G28 a náš senzor je přibližně 0,04, zatímco výsledek IMU Crista je přibližně 0,12. Rozdíl mezi směrodatnou odchylkou MTi-G28 a našeho snímače je pouze 0,0035, což je obvykle lidským okem nerozlišitelné.
Dodatečné tabulkové srovnání koeficientu signálu k šumu je uvedeno v tab. 4.
Důležitým problémem inerciálních měřicích jednotek je časová stabilita výstupních dat. Provedli jsme sérii testů stability v délce trvání 4 h. Výsledky prezentované na obr. 9 byly získány po zprůměrování z pěti vzorků každé IMU v testu. Lze učinit dvě hlavní pozorování. Zaprvé, že výsledky MTi-G28 a našich IMU jsou srovnatelné. Rozdíl dosažených průměrných hodnot je pouze 0,00027 a rozdíl mezi hodnotami směrodatné odchylky je 0,00226, což je ještě méně než při testu s pohybem. Druhým zjištěním je, že výsledky našeho snímače a MTi-G28 jsou více než 20krát blíže skutečné hodnotě 0.

Obrázek 8: Výsledky našeho snímače a MTi-G28 jsou více než 20krát bližší skutečné hodnotě 0.
Srovnání výstupních dat při pohybu z osy Y gyroskopů pro testované senzory (MTiG-28, Crista IMU a náš senzor). Jednotky času jsou .
| Crista IMU (S/NKAL) | MTiG (S/ NKAL) | IMU 5 (S/NKAL) | |
| Accelerometry | 20,3 | 38,1 | 43,2 |
| Magnetometry | N/A | 719,3 | 767,9 |
| Gyroskop | 13,6 | 206,7 | 254,5 |
Tabulka 4.
Srovnání koeficientu signálu k šumu pro testované IMU. (Čím větší hodnota, tím lepší).
Globální dostupnost GPS, relativně vysoká spolehlivost odečtů a absence potřeby další infrastruktury jsou hlavními důvody, proč většina moderních inerciálních navigačních systémů využívá GPS. INS lze obvykle charakterizovat rychlou rychlostí aktualizace a malou, ale nevázanou chybou. Chyba GPS je omezená, avšak doba aktualizace je pomalá a odhad polohy není spolehlivý. Vzhledem k uzavřené architektuře většiny modulů GPS je nejoblíbenějším typem metod fúze tzv. nespojitá nebo volně spojená pomoc. INS s GPS se používá v bezpečnostních systémech vozidel pro odhad bočního skluzu vozidla. Standardní použití zahrnuje navádění a navigaci vozidla. Signál GPS vyžaduje dobrou viditelnost satelitů, což v kaňonech, zejména v městském prostředí kaňonů, často není možné. Systémy GPS/INS se často využívají pro navigaci kvadrokoptéry nebo navádění raket.

Obrázek 9.
Srovnání výstupních dat při testu stability z osy Y gyroskopů pro testované senzory (MTiG-28, Crista IMU a náš senzor). Každá hodnota v grafu je průměrná hodnota z 5 vzorků ze snímače.
Vyvinuli jsme inerciální navigační systém jako kompletní navigační řešení zabudované do jedné desky plošných spojů. Obsahuje výše představenou inerciální měřicí jednotku 10-DOF doplněnou modulem GPS (Global Positioning System). Pro kompenzaci nízké přesnosti odhadu nadmořské výšky GPS byl zabudován další barometr. Popsaný INS umožňuje měřit úhly ve třech rozměrech, zrychlení rovněž ve třech rozměrech, směr nejsilnějšího magnetického signálu a teplotu okolí. Využívá technologii MEMS, aby se zmenšily rozměry i hmotnost snímače. Deska s plošnými spoji INS s konektorem MCX váží 3,67 g bez montáže a 8,86 g se standardní montáží.
Měřená data ze snímače lze v závislosti na verzi odesílat prostřednictvím sběrnice USB nebo CAN, což jsou typické průmyslové standardy přenosu dat. Od moderních senzorů je vyžadována flexibilita, aby je bylo možné integrovat do stávajících systémů. Ze stejného důvodu má senzor flexibilní konfiguraci výstupních dat. Výstup senzoru lze získat ve třech verzích: jako surová data senzoru, jako data po kalibraci a teplotní kompenzaci nebo jako výstup filtru pro zpracování. Data ze snímačů mohou být uživateli dodávána také v různých formách. První formou je matice natočení, která je generována na základě dat ze zařízení. Data mohou být koncovému uživateli dodávána také ve formě Eulerových úhlů a jejich hodnot udávaných ve stupních nebo v radiánech. Třetí typ reprezentace výstupních dat je pomocí kvaternionů. Výstupní souřadnice polohy z GPS jsou zasílány v souřadnicovém systému ECEF (Earth Centered Earth Fixed). Jednotkou rychlosti odhadované systémem GPS je m/s. Použitý vestavěný výškoměr atmosférického tlaku se vyznačuje vnitřní teplotní kompenzací. Umožňuje měřit atmosférický tlak v rozsahu 20 až 110 kPa s rozlišením 1,5 Pa. Lze jej použít k odhadu nadmořské výšky snímače s rozlišením rovným 30 cm. Geografická lokalizace snímače se počítá pomocí modulu GPS. Modul GPS je připojen k mikroprocesoru pomocí sériové komunikační sběrnice. Pro zlepšení kvality odhadu souřadnic je možné přejít na diferenciální korekce GPS (DGPS). Výstup z GPS je v souřadnicovém systému ECEF (Earth Centered Earth Fixed) a frekvence je 10 Hz.
Představený senzor INS má objem pod 4 cm3 i s pouzdrem a váží 8,86 . Taková velikost senzoru může konstruktérům robotů umožnit přechod od zařízení značných rozměrů ke konstrukcím v mikroměřítku. Maximální zrychlení, které je senzor schopen vydržet, je 500 , přičemž vstupní napětí je od 3,5 do 8 V a odběr proudu je 50 mA. Existují dva různé typy pouzdra, které umožňují připevnění senzoru na různá místa. Nejmenší verze Micro (obr. 10) má rozměry s montáží 32,7 x 14,9 x 8,0 . Verze s konektorem MCX (obr. 3b) má rozměry 32,7 x 14,9 x 12,1 . Objem rozšířené verze je menší než 6 cm3. Senzor může pracovat v širokém rozsahu teplot od -40 °C do 80 °C.
Fyzikální rozměry všech verzí jsou uvedeny v tab.5..

Obrázek 10.
Přední (a) a zadní (b) strana PCB inerciálního navigačního systému s konektorem MCX.
| INS typ | Dim. X | Dim. Y | Dim. Z | Jednotky | Objem |
| Mikro verze | 32,7 | 14,9 | 8.0 | mm | 3,897 cm3 |
| Rozšířená verze | 32,7 | 14.9 | 12,1 | mm | 5,895 cm3 |
| Běžné parametry | Min. | Typ | Max. | Jednotky | |
| Hmotnost (bez krytu) | – | 3.67 | – | gramů | |
| Hmotnost (s pouzdrem) | – | 8.86 | – | gramů | |
| Provozní teplota | -40 | – | 80 | °C | |
| Skladovací teplota | -60 | – | 100 | °C | |
| Maximální zrychlení | – | 500 | – | g | |
| Vstupní napětí | 3.5 | 5,0 | 6,0 | V | |
| Proud | 40 | 50 | 60 | mA | |
Tabulka 5.
Fyzikální charakteristika snímače.
Kalibrované orientace os jsou vyryty a barevně vyznačeny na horní straně tak, jak je uvedeno na obr. 5. 11.

Obrázek 11.
Schéma montáže INS. a) verze Micro-Mounting, b) verze Extended.
Představený INS byl porovnáván s nejmenší IMU s objemem pod 2 . Na obr. 12ab jsou vyznačeny obě osy měření a velikosti. Rozměr X mikro IMU 5 je 18,6, což je přibližně 57 % velikosti INS. Rozměr Y je 14,7, což je přibližně 99 % velikosti INS, a velikost Z IMU je více méně rovna 91 % velikosti mikro verze INS a 60 % velikosti rozšířené verze. Rozšířená verze LEMO IMU má však rozměr 18, což je 225 % mikro verze INS. Porovnání na základě objemu umožňuje pouze konstatování, že mikro verze INS je méně než dvakrát větší (195 % mikro verze IMU).

Obrázek 12.
Srovnání navrhovaného INS (b) s nejmenší IMU na světě (a). Na obrázku jsou zakresleny měřicí osy. c) Srovnání montážní velikosti předloženého INS a IMU, d) Srovnání vnějších charakteristik navrženého INS a IMU.
.